La corrélation d’images numériques (CIN) est une technique qui permet de mesurer les composantes de déplacement perpendiculaires à la ligne de visée (LOS) en utilisant des images photographiques. La CIN est utilisée dans différents domaines (dynamique des fluides, glaciologie, géomorphologie, géotechnique, potamologie, etc.). Bien que son utilisation dans la surveillance des glissements de terrain soit relativement peu courante, il s’agit d’une méthode de mesure qui nécessite un matériel peu onéreux et facile à installer, y compris dans des endroits isolés. La CIN peut fonctionner avec des images capturées par un appareil photo du commerce à condition que la résolution des images soit suffisante pour identifier les mouvements escomptés. L’utilisation d’appareils photo reflex ou sans miroir à haute résolution permet d’obtenir des résultats de meilleure qualité. Pour des résultats de haute qualité, il convient de faire attention aux conditions d’installation du système de capture d’images qui doit satisfaire une série d’exigences:
- Il est important de stabiliser l’appareil photo pour minimiser les éventuels mouvements risquant de modifier le cadre.
- Il est conseillé de connaître les paramètres de l’appareil photo (type de capteur, résolution, longueur focale) afin de pouvoir orthorectifier correctement les résultats de la CIN.
Utilisable en continu et installable dans des endroits isolés, le système peut être automatisé à l’aide d’une connexion à un mini-ordinateur chargé de gérer les sessions photographiques et de transmettre les images à un serveur distant où les calculs seront effectués à l’aide d’algorithmes spécifiques. Pour la gestion de l’appareil photo à distance, il est nécessaire de disposer du logiciel d’interface de l’appareil (SDK) fourni par le fabricant ou, à défaut, d’utiliser un logiciel ouvert comme gphoto (http://www.gphoto.org/). Ceci permet de contrôler efficacement un grand nombre de modèles d’appareils photo du commerce et de créer un système de surveillance autonome. La Figure 1 représente un exemple de système de surveillance photographique destiné à la corrélation d’images numériques Peu gourmand en électricité, ce type de système peut être alimenté efficacement avec des panneaux solaires et constituer une solution intéressante et efficace dans des endroits complexes et isolés où il est nécessaire de disposer d’un système simple et robuste à la fois.

Description technique du principe de fonctionnement:
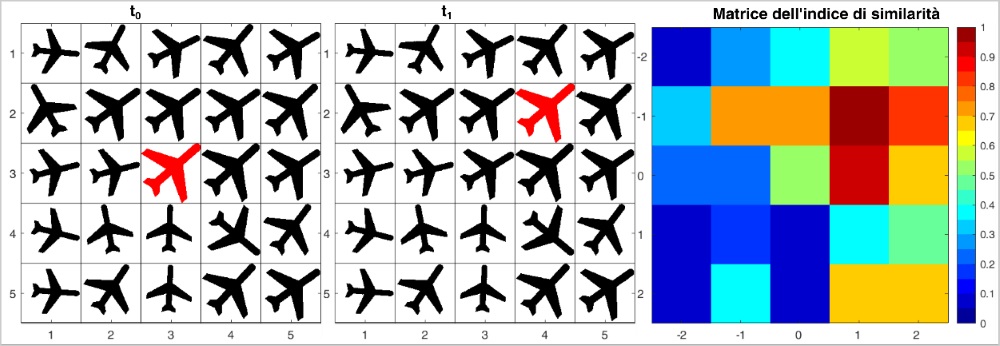
Le principe de la corrélation d’images numériques repose sur la recherche de la similarité maximale de deux images. Le procédé type est le suivant : le système identifie une portion d’image capturée à l’instant t0 (modèle de référence) et recherche la même portion sur une image capturée à l’instant t1 (modèle de recherche). À supposer qu’un mouvement se soit produit pendant le temps qui s’est écoulé entre les deux capteurs, alors la même portion d’image ne représente pas exactement la même scène. Pour évaluer l’ampleur du déplacement, le modèle de référence est déplacé autour du modèle de recherche et un indice de similarité est calculé pour chaque position (appariement par modèle de référence). La position où l’indice de similarité est le plus élevé correspond au déplacement du modèle de référence (Figure 2). L’indice de similarité le plus utilisé est celui obtenu par corrélation croisée normalisée. Une alternative valable pour le calcul de la corrélation croisée est celle de la transformée de Fourier. Cette solution permet d’accélérer sensiblement les temps de calcul mais elle comporte parfois une exactitude moindre des résultats.
La corrélation d’images numériques fonctionne avec des images monochromes. L’intensité de l’image est la solution la plus courante, même s’il est possible d’utiliser les valeurs d’intensité du gradient ou la direction du gradient de l’image.
Un paramètre important de la corrélation d’images numériques est la dimension du modèle de référence. Plus il est petit, plus la précision est grande et plus la résolution spatiale est élevée. Toutefois, en cas de dimensions réduites, le rapport signal-bruit est inférieur et peut nuire à la précision des résultats. Au contraire, un modèle de référence de grande dimension offre une meilleure précision mais une plus faible exactitude.
Le résultat de la corrélation d’images numériques est une cartographie spatiale des deux composantes de déplacement perpendiculaires à la ligne de visée. Les résultats sont exprimés en pixels. La conversion métrique est possible à travers l’orthorectification des images.
Description des méthodes d’utilisation pour la surveillance des phénomènes de glissement de terrain et exemples pratiques:
La chaîne de traitement de la CIN prévoit généralement les étapes suivantes : 1) sélection des images, 2) co-enregistrement, 3) calcul de la similarité de paires d’images, 4) orthorectification. La sélection des images est une opération cruciale parce qu’elle détermine la qualité des résultats. Il est primordial de sélectionner des paires d’images caractérisées par des conditions d’éclairage similaires pour obtenir une disposition des ombres la plus homogène possible sur la surface. C’est pourquoi il est préférable d’utiliser des images capturées dans des conditions d’éclairage diffus afin de réduire l’importance des ombres. La sélection des images exige généralement une intervention manuelle, mais il est possible d’utiliser des algorithmes d’apprentissage machine pour automatiser la procédure. Le co-enregistrement des images permet de compenser les éventuelles rotations et translations entre les images dues à d’éventuels mouvements de l’appareil photo. Le co-enregistrement est effectué en calculant le déplacement dans une zone considérée comme stable. La troisième étape consiste à calculer l’indice de similarité en utilisant comme modèle de référence la portion d’image contenue à l’intérieur de la fenêtre mobile qui se déplace sur toute l’image. Enfin, la procédure d’orthorectification permet de convertir les valeurs de déplacement en mètres.
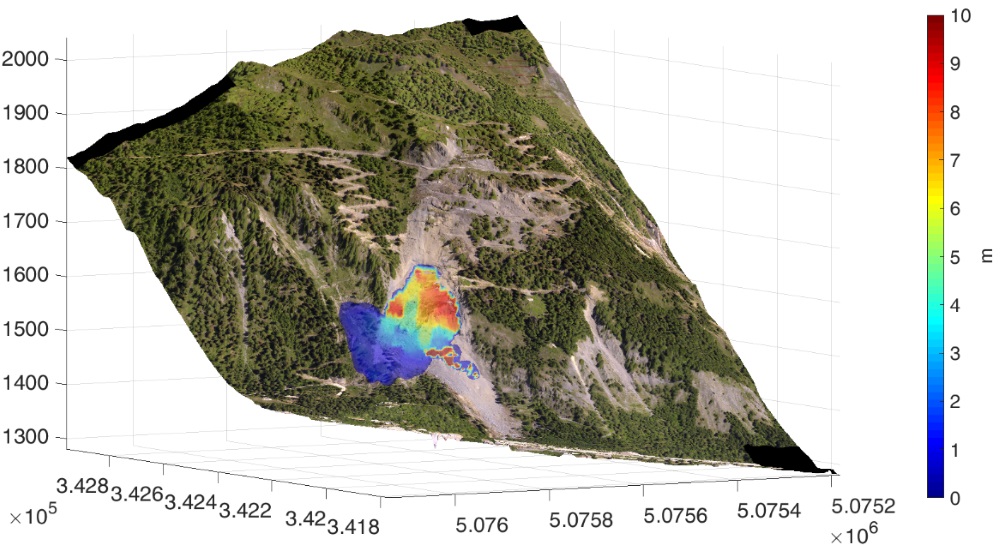
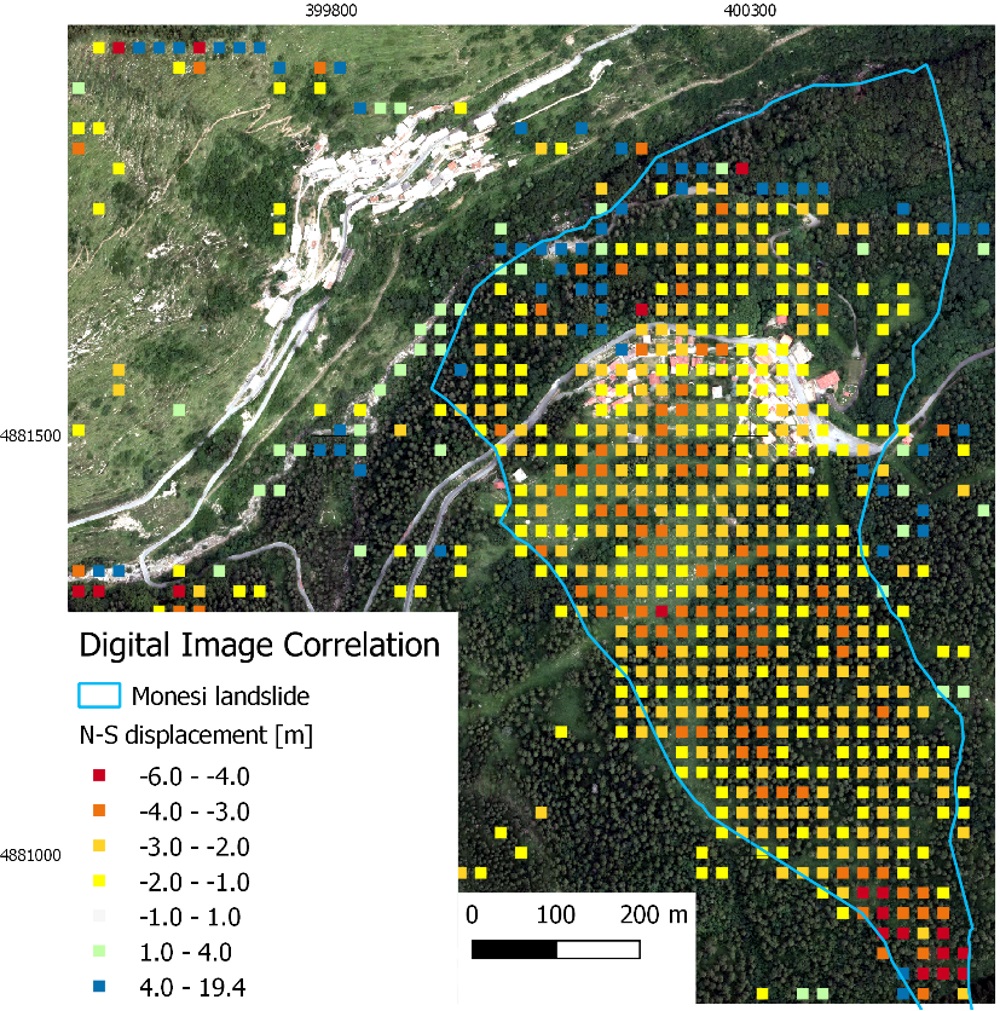
Les Figure 3 et 4 illustrent deux exemples de CIN utilisée pour la surveillance des glissements de terrain. La Figure 3 représente le glissement de terrain du Mont de La Saxe (AO) entre le 16 et le 17 avril 2014. La CIN a été réalisée en utilisant des photographies .jpeg de 8 Mpx capturées à une distance d’environ 800 m. La Figure 4 montre un cas d’utilisation de la CIN avec des images satellitaires. Il s’agit de la composante de déplacement nord-sud du glissement de terrain de Monesi di Mendatica (SV).
Cas d’utilisation les plus indiqués:
La corrélation d’images numériques est un instrument à haut rapport coûts/performances. Le système de surveillance nécessaire pour utiliser la corrélation d’images numériques est minime et facile à installer dans des endroits escarpés et peut être contrôlé à distance. De plus, les résultats sont faciles à interpréter. Mais la CIN n’est pas utilisable lorsque les conditions de visibilité sont mauvaises (la nuit et en cas de brouillard). De plus, l’incertitude de la CIN est d’environ 0,5 – 1 pixel. Pour pouvoir évaluer les mouvements d’un glissement de terrain il est donc nécessaire d’utiliser la CIN avec des images capturées selon un intervalle de temps suffisant pour qu’un déplacement de 0,5 – 1 pixel se soit produit. Il s’ensuit que la corrélation d’images numériques convient davantage à la surveillance de phénomènes de glissement de terrain caractérisés par une vitesse moyenne-haute. Lorsque le phénomène est très lent et la résolution des images est proche de l’ampleur du mouvement, l’utilisation de cette technique est vivement déconseillée.
Bibliographie minimum:
- White, D. J., Take, W. A., & Bolton, M. D. (2003). Soil deformation measurement using particle image velocimetry (PIV) and photogrammetry. Géotechnique, 53(7), 619-631.
- Travelletti, J., Delacourt, C., Allemand, P., Malet, J. P., Schmittbuhl, J., Toussaint, R., & Bastard, M. (2012). Correlation of multi-temporal ground-based optical images for landslide monitoring: Application, potential and limitations. ISPRS Journal of Photogrammetry and Remote Sensing, 70, 39-55.
- Gabrieli, F., Corain, L., & Vettore, L. (2016). A low-cost landslide displacement activity assessment from time-lapse photogrammetry and rainfall data: Application to the Tessina landslide site. Geomorphology, 269, 56-74.