Description technique du principe de fonctionnement:
Le système mondial de positionnement par satellites (en anglais Global Navigation Satellite System – GNSS) est un système d’origine militaire qui transmet à un récepteur prévu à cet effet un signal provenant d’une constellation de satellites en orbite permettant de calculer les coordonnées univoques du point sur la Terre où se trouve le récepteur.
Le récepteur est constitué d’une antenne et d’un dispositif électronique en mesure de décoder le signal provenant des satellites en orbite et de calculer la position.
Ce système a connu une évolution considérable au cours des trente dernières années et est devenu aujourd’hui un instrument d’usage courant. Installé dans la plupart des smartphones, le système GNSS est un support fondamental pour toutes les activités humaines qui nécessitent de connaître les coordonnées d’un point sur la surface de la Terre. Il est très couramment utilisé lors des activités qui nécessitent le suivi d’une trajectoire entre un point de départ et un point d’arrivée.
Outre le positionnement dans le cadre de déplacements, le GNSS est une technologie de détection topographique complexe et variée qui permet, à travers des instruments professionnels et des méthodes de traitement appropriées, d’atteindre une précision inférieure au centimètre et qui peut donc être utilisée également lorsqu’une précision élevée de la mesure du positionnement est nécessaire. Pour simplifier, deux grandes catégories d’utilisation des récepteurs GNSS peuvent être considérées pour des activités liées à des relevés topographiques/géodésiques: i) la modalité statique et ii) la détection avec correction en temps réel (RTK)
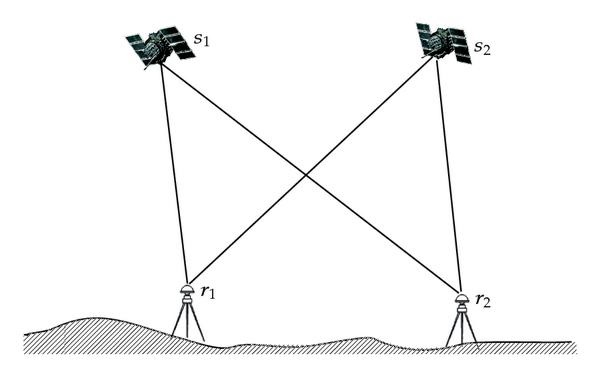
Modalités de détection statique (positionnement relatif):
C’est la détermination des différences de coordonnées (lignes de base) entre deux ou plusieurs points (aux coordonnées connues ou inconnues) occupés simultanément par plusieurs récepteurs.
Il a pour but de déterminer les coordonnées de points inconnus par rapport aux récepteurs occupant des points dont les coordonnées sont connues et stables dans le temps.
Pendant les phases d’acquisition, les récepteurs restent tous « stationnaires » par rapport au point de mesure.
La longueur de la fenêtre d’occupation dépend de la distance entre les récepteurs et du degré de précision relatif que l’on souhaite atteindre lors du calcul des différences de coordonnées.
Cette méthode de détection présuppose une phase d’analyse ultérieure et un traitement a posteriori des données collectées afin de déterminer les coordonnées tridimensionnelles des points à surveiller et leur fiabilité en termes de précision métrique.
Précision type: inférieure au centimètre
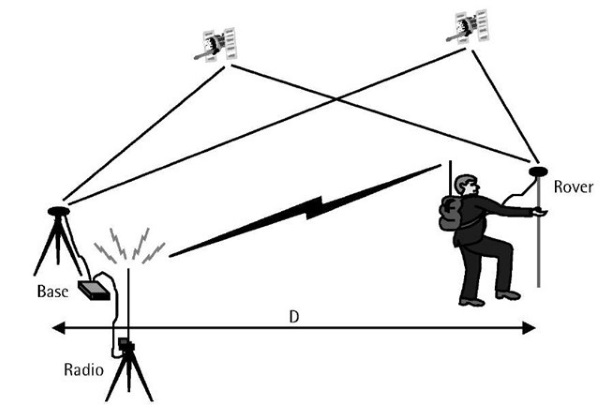
Modalité différentielle en temps réel (Cinématique en temps réel (RTK en anglais):
C’est la détermination des coordonnées d’un point effectuée avec un récepteur qui reçoit les signaux des satellites puis une correction provenant d’un autre récepteur fixe ou d’un réseau de stations permanentes dont les coordonnées sont connues et stables dans le temps. Les coordonnées sont obtenues en temps réel et aucun traitement ultérieur n’est nécessaire.
Le récepteur est généralement configuré en mode « mobile ».
Précision type: de l’ordre du centimètre
Description des méthodes d’utilisation pour la surveillance des phénomènes de glissement de terrain et exemples pratiques:
Lors de la surveillance des phénomènes de glissement de terrain, les GNSS sont utilisés pour détecter la position des points de mesure où les appareils sont positionnés. Des sessions de mesures répétées dans le temps permettent d’obtenir la position des différents points concernés par les campagnes de mesure et de calculer d’éventuels déplacements dans l’espace d’un ou plusieurs points. Pour obtenir ce résultat, il est nécessaire d’installer une borne topographique garantissant le caractère univoque et répétable du repositionnement de l’appareil lors des différentes campagnes de mesure.
En général, les systèmes GNSS sont utilisés pour contrôler les phénomènes de glissement de terrain lorsque la surface à surveiller est vaste ou lorsqu’il n’y pas de visibilité directe entre les différents points de mesure. Dans ce cas, ils représentent une alternative valable à l’utilisation d’une station entièrement robotisée.
La réalisation de ces campagnes de mesure prévoit la matérialisation d’une série de points de mesure à l’intérieur de la zone de glissement de terrain (rovers) et de certains points de contrôle (références) dans des zones limitrophes du phénomène à surveiller mais considérées comme stables. Les références jouent un rôle important car elles permettent d’effectuer des opérations de compensation des données collectées par les rovers et d’en améliorer la précision.
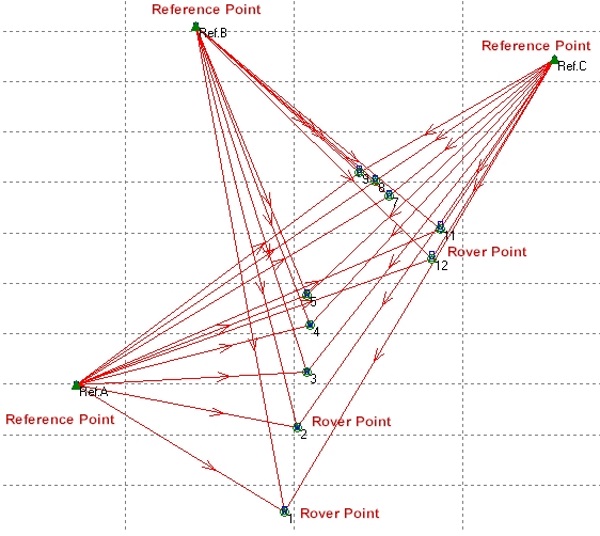
Figure 3: géométrie d’un réseau type de surveillance GNSS d’un phénomène de glissement de terrain composé de 10 bornes de mesure installées sur le terrain en glissement et trois points de référence.
Les systèmes GNSS peuvent être utilisés de différentes manières en fonction de la vitesse du phénomène de glissement de terrain à surveiller. Concernant les phénomènes caractérisés par une cinématique lente, les GNSS peuvent être utilisés de manière statique lors des campagnes de mesure répétées dans le temps. Dans ce cas, on effectue une campagne de mesure où les récepteurs sont installés sur les différents points de mesure et laissés en mode acquisition pendant plusieurs heures. Les données obtenues sont ensuite traitées et compensées en utilisant celles provenant des références. Dans ce cas, la fréquence d’exécution des campagnes peut être annuelle.
En outre, lors de la surveillance de phénomènes de glissement de terrain lents, le nombre et la géométrie des bornes de référence revêtent un rôle fondamental pour la compensation des mesures.
Étant donné que les composantes géométriques des points de surveillance se réfèrent aux bornes dont les coordonnées sont connues, il est très important de garantir la stabilité et l’immobilité de ces bornes dans le temps.
Dans le Piémont, de nombreux phénomènes de glissement de terrain font l’objet de ce type de surveillance, avec des campagnes de détection annuelles effectuées par le CNR IRPI ou par ARPA Piemonte.

Figure 4: exemple d’installation d’une borne topographique sur un affleurement rocheux finalisée à la surveillance du processus gravitatif touchant l’ensemble du versant (Valprato Soana – TO). Dans ce cas, l’antenne de l’appareil satellitaire est vissée sur une borne ancrée directement dans l’affleurement rocheux. À chaque session de mesure, l’antenne est repositionnée en la vissant sur la borne afin de garantir une répétabilité de mesure élevée.
À titre d’alternative, les phénomènes à cinématique très active (centimètres ou mètres / jour) peuvent être mesurés avec des techniques de positionnement en temps réel qui supposent par conséquent une détermination immédiate de la position des points de mesure y compris pendant l’évolution du glissement de terrain.
Dans ce cas, compte tenu de la dynamique du phénomène à surveiller, le niveau de précision exigé est suffisamment satisfait par la méthode de mesure elle-même qui ne nécessite pas, par conséquent, la présence d’un réseau de bornes de référence matérialisées ad hoc.
Cas d’utilisation les plus indiqués:
Les réseaux GNSS peuvent être utilisés de nombreuses manières différentes en fonction du type de récepteur utilisé et des modalités de traitement des données.
En cas de glissement de terrain lent, la surveillance par détections statiques périodiques s’avère la plus indiquée. Dans ce cas, le réseau de surveillance se compose d’une série de bornes qui garantissent une répétabilité de mesure élevée. Des campagnes semestrielles ou annuelles sont suffisantes pour mesurer les déplacements (généralement de quelques centimètres) qui se sont produits pendant l’intervalle de temps considéré.
Concernant les phénomènes caractérisés par une activité plus intense, il est possible de prévoir également des installations permanentes. Dans ce cas, les récepteurs GNSS sont installés en fixe sur le glissement de terrain et plusieurs campagnes d’acquisition sont effectuées chaque jour. Les données collectées pendant les sessions de mesure peuvent être traitées avec des systèmes qui effectuent ce type d’analyse de manière automatique.