Description technique du principe de fonctionnement
Dans le domaine de la surveillance des glissements de terrain, comprendre la géométrie de la surface en mouvement revêt souvent une importance primordiale. Pour atteindre cet objectif, il est donc nécessaire de connaître les mouvements de la surface topographique, mais également en profondeur. Lorsqu’il s’avère nécessaire d’évaluer la dynamique de déformation du sous-sol, la méthode de mesure la plus couramment utilisée est celle de l’inclinométrie. Cette méthode de mesure permet d’évaluer les déplacements horizontaux en profondeur à l’intérieur d’une perforation équipée d’un revêtement spécifique et l’utilisation d’une ou plusieurs sondes inclinométriques qui convertissent une valeur d’inclinaison de la sonde en valeur de déplacement horizontal. L’évolution des valeurs mesurées dans le temps permet d’évaluer le taux d’activité du phénomène de déplacement. Grâce aux valeurs de déformation en profondeur, il est possible d’identifier la position de la ou des surfaces de mouvement du glissement de terrain et d’estimer ainsi les volumes dont il est potentiellement question.
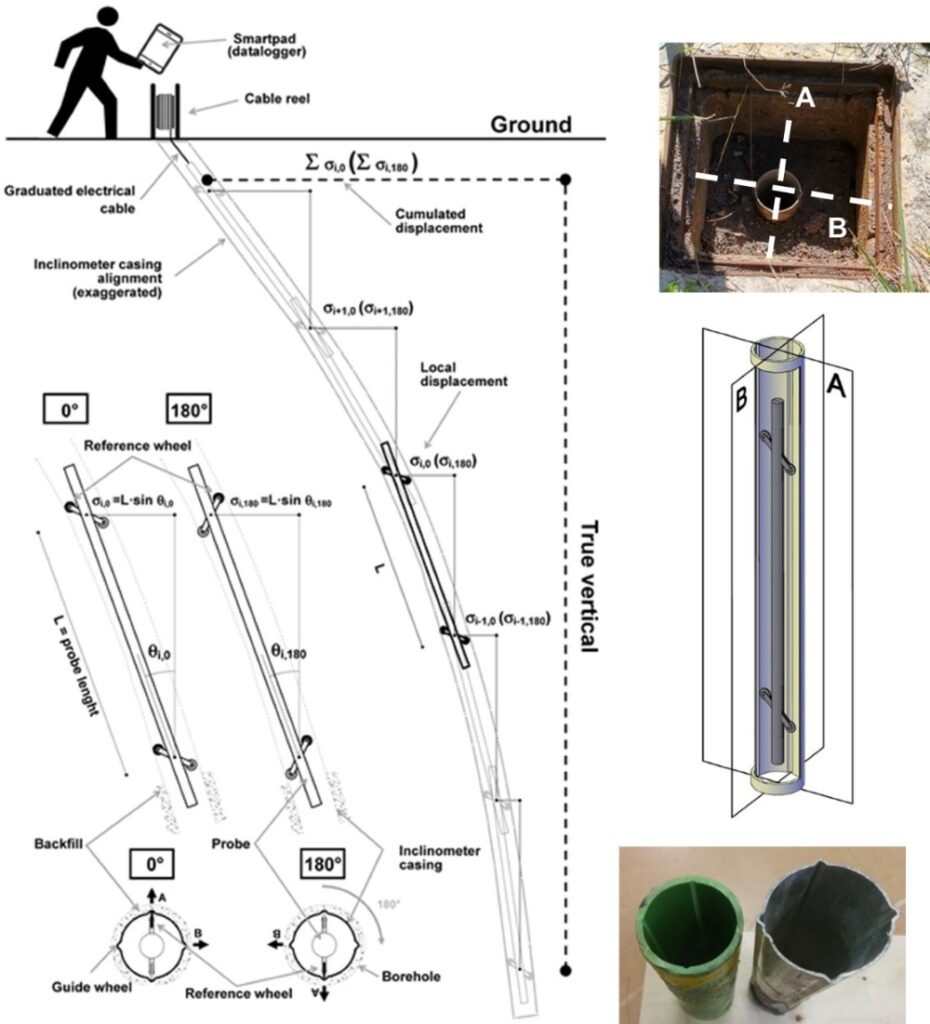
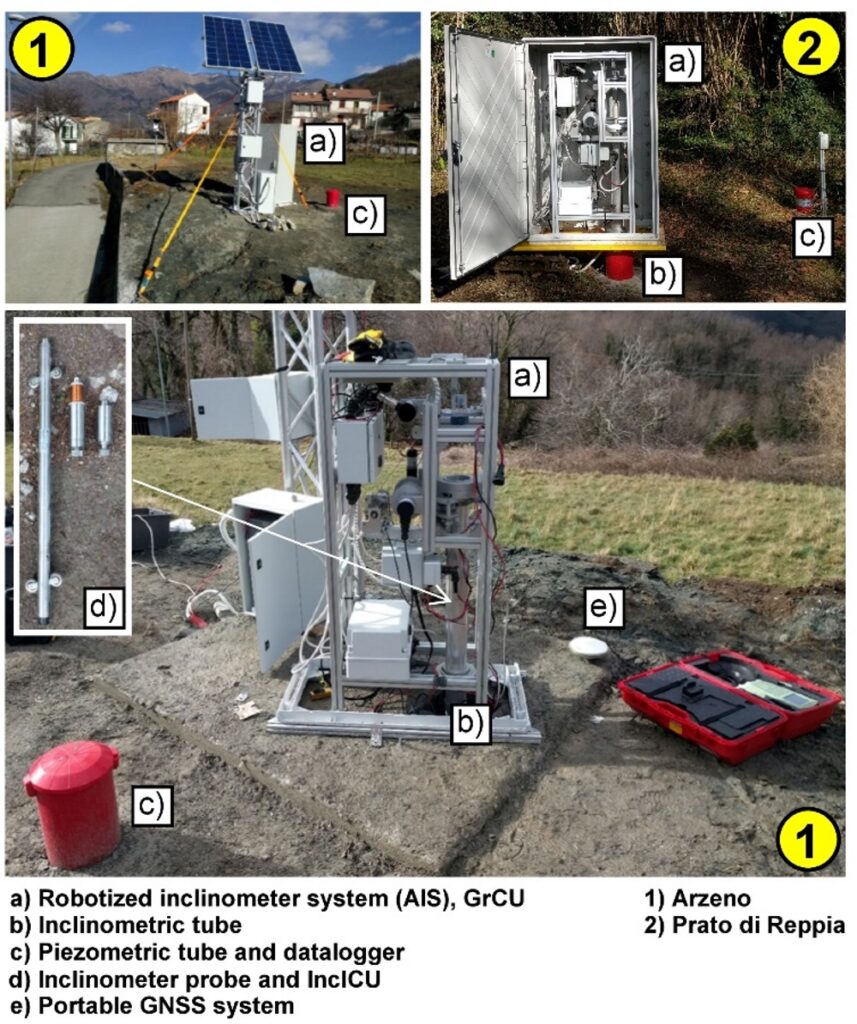
Un système de mesure classique comprend : i) une sonde inclinométrique, ii) un tube de guidage cannelé (appelé tube inclinométrique) qui revêt la perforation jusqu’à une profondeur plus grande que la surface de mouvement du glissement de terrain ; iii) un appareil de mesure (enregistreur de données) et un câble électrique gradué (Fig. 1, 2).
La sonde inclinométrique est constituée d’un cylindre en acier ou en titane d’une longueur de 60 – 70 cm environ et d’un diamètre de 2 – 3 cm. À chaque extrémité, elle est dotée d’un chariot à roulettes à entraxe de 50 cm (60 cm pour les Anglo-saxons) qui permettent un coulissement contrôlé de la sonde à l’intérieur des rainures du tube inclinométrique. La sonde est équipée de deux capteurs accélérométriques (accélérométriques asservis ou à technologie MEMS) transmettant un signal électrique proportionnel à l’angle d’inclinaison de l’axe de l’instrument par rapport à l’axe vertical. Un accéléromètre mesure l’inclinaison dans le plan des roulettes (axe A), l’autre dans le plan perpendiculaire (axe B).
L’extrémité supérieure de la sonde est reliée à un câble électrique qui transporte l’alimentation électrique et les signaux de mesure entre la sonde et l’appareil enregistreur de données. Le câble fait également office d’élément de support et de déplacement de la sonde inclinométrique dans le tube de guidage et, grâce à une série de crans (ou graduations) permet un positionnement aux différentes profondeurs de mesure (généralement par paliers de 50 ou 100 cm).
Principes fondamentaux de la mesure inclinométrique :
- Le tube inclinométrique se déforme de la même manière que le terrain environnant de sorte que les mesures d’inclinaison du tube peuvent être considérées comme représentatives des mouvements du terrain ;
- La verticale inclinométrique, qui se déforme comme un corps continu, est discrétisée selon une segmentation d’autant plus précise que le nombre de points de mesure est élevé ;
- Les mesures sont répétées deux fois consécutives en faisant pivoter la sonde de 180° par rapport à la première série de mesures ; Cette approche permet d’améliorer la qualité des données et d’identifier et corriger les éventuelles erreurs grossières typiques des opérations manuelles ;
- La perforation doit être suffisamment profonde et permettre d’intercepter des niveaux stables et non sujets à des mouvements importants ;
- Les mesures sont analysées pour chaque profondeur (mesure locale) ou par intégration depuis le bas (mesure cumulée) en considérant le point de départ comme situé dans une zone stable (au sens du paragraphe 4) ;
- Les mesures sont analysées en différentiel par rapport à la première mesure considérée comme origine étant donné qu’il est impossible de réaliser une perforation parfaitement verticale (Fig. 3, 7).
Les mouvements de terrain provoquent un déplacement du tube par rapport à sa position initiale dans des secteurs où la matière présente généralement des caractéristiques géomécaniques médiocres. L’ampleur, la profondeur et la vitesse de ces déplacements sont calculées en comparant les mesures consécutives à l’ensemble de données initial (mesure d’origine).

Pour réaliser des mesures inclinométriques, il est possible non seulement d’utiliser une instrumentation manuelle, mais également des systèmes de collectes de données automatiques. Concernant les systèmes automatiques, il existe deux approches fondamentales :
- La première est de créer de véritables chaînes de capteurs positionnés stablement à l’intérieur du tube ;
- La seconde approche, développée par le CNR IRPI, consiste en revanche à robotiser la mesure manuelle de manière à optimiser les avantages offerts par la qualité des mesures manuelles avec ceux de l’automatisation électromécanique (Fig. 4, 6).
Les deux approches ont leurs avantages et leurs inconvénients, tant en termes de technologie/métrologie que de coûts. Le tableau 1 présente une analyse comparative des deux approches.
| Système inclinométrique robotisé | Inclinomètres positionnés (IPI) avec une chaîne de capteurs biaxiaux | |
| Discrétisation verticale | 500 mm (EU) ou 60 cm (non UE) | 1000 à 3000 mm |
| Résolution temporelle | 1 à 8 mesures/jour | 1 à 24 mesures/jour |
| Double lecture (0 – 180°) | Oui | Impossible en raison du statisme des sondes |
| Positionnement de la sonde dans le tube | Automatique par moteur et encodeur de précision | Sondes positionnées de manière permanente aux profondeurs prévues |
| Raccordement entre sonde et enregistreur de données | Câble en Dyneema pour les mouvements et système semi-sans fil pour la gestion des données | Câble électrique pour l’alimentation électrique et la transmission des signaux, et acier pour le soutien mécanique Les sondes sont raccordées mécaniquement à l’aide d’éléments métalliques ou en fibre de carbone |
| Exactitude | Très élevée grâce à la double lecture et à la robotisation | Élevée Il existe une certaine incertitude quant à la stabilité des mesures à long terme |
| Capacité de mesurer toute la longueur du tube | Oui Le système est indépendant de la longueur du tube | Oui si le tube est instrumenté sur toute la longueur Dans de nombreux cas, l’instrumentation partielle de certains tronçons est la solution préférée pour des raisons économiques. |
| Capacité de décrire des zones où les dimensions de la déformation sont limitées | La discrétisation de 500 mm permet de mesurer correctement des bandes de découpe de petites dimensions | Si le nombre de capteurs est limité ou l’entraxe des capteurs trop grand, une sous-estimation des déformations réelles est possible |
| Capacité de décrire de grandes déformations | La capacité est comparable à celle des mesures manuelles et la limite dérive de l’impossibilité pour la sonde de passer dans les tronçons excessivement courbés. | Le positionnement permanent permet généralement de mesurer des déformations plus grandes que les autres méthodes. Cependant, dans ce cas, les sondes sont perdues, car elles ne peuvent plus être extraites. |
| Précision | ±0,4 mm/30 m pour le canal A ±1,2 mm/30 m pour le canal B | ±2 mm/30 m pour le canal principal Inférieure pour le canal transversal |
| Coût | Moyen/élevé mais indépendant de la longueur du tube | Moyen/élevé et proportionnel au nombre de capteurs installés |
Description des méthodes d’utilisation pour la surveillance des phénomènes de glissement de terrain et exemples pratiques :
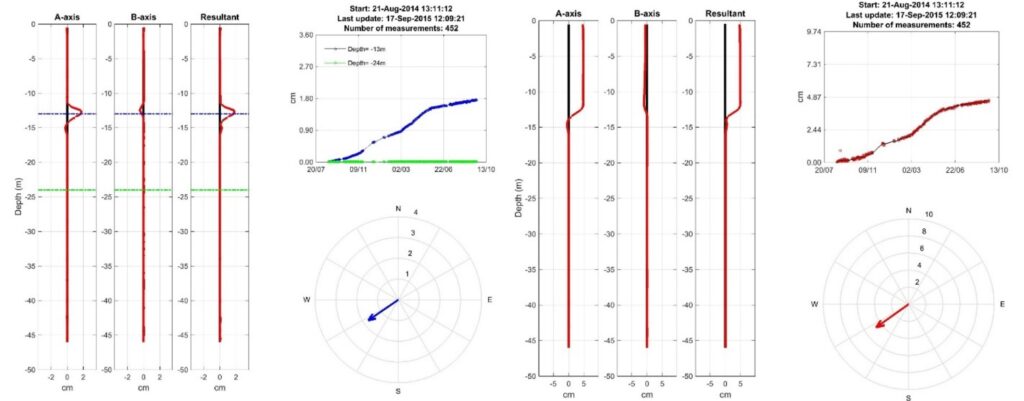
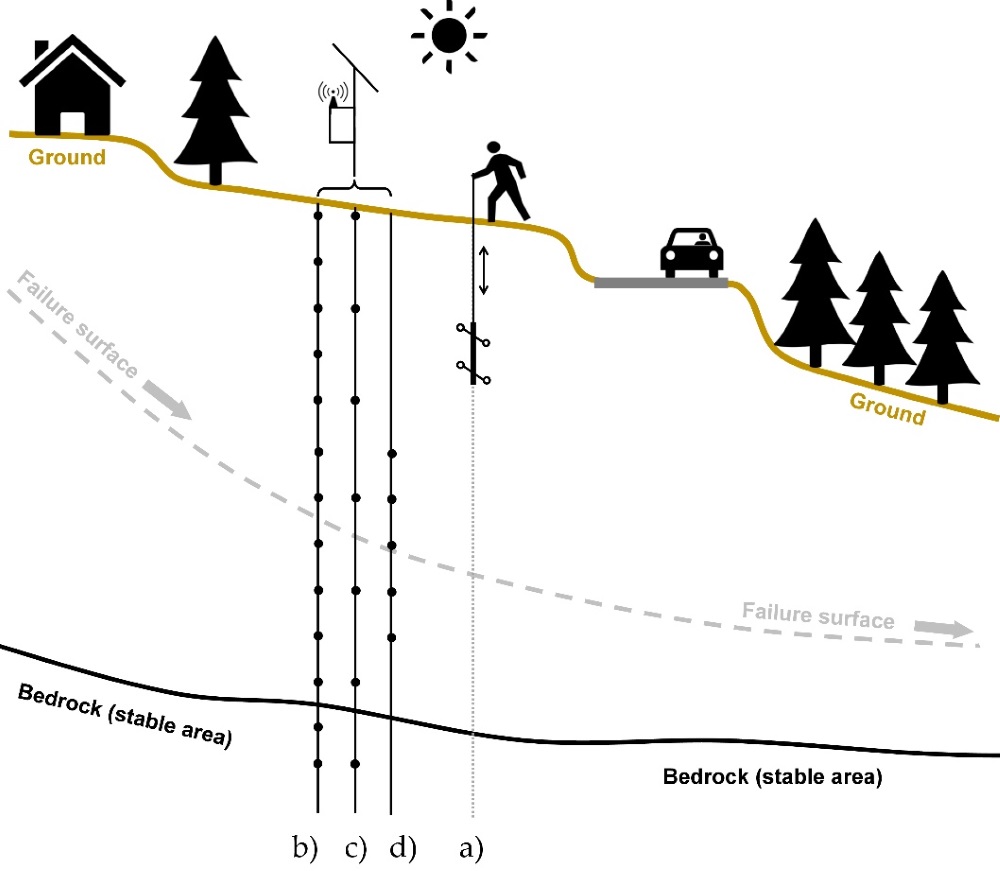
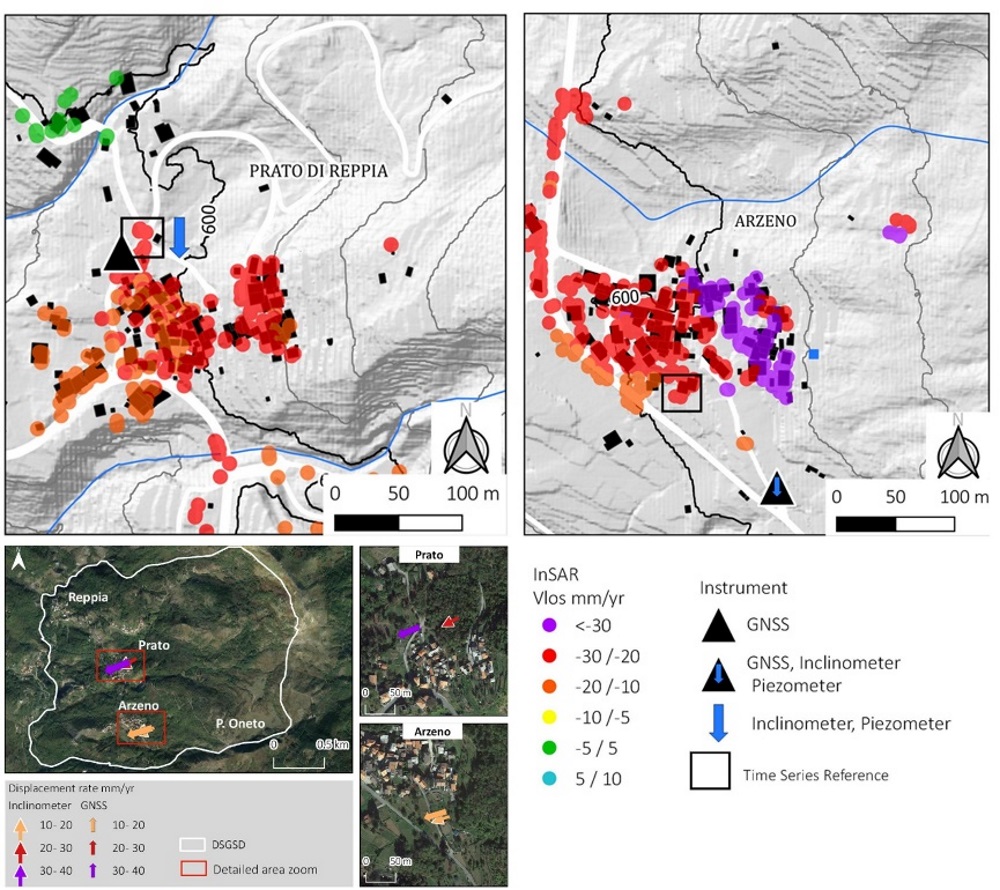
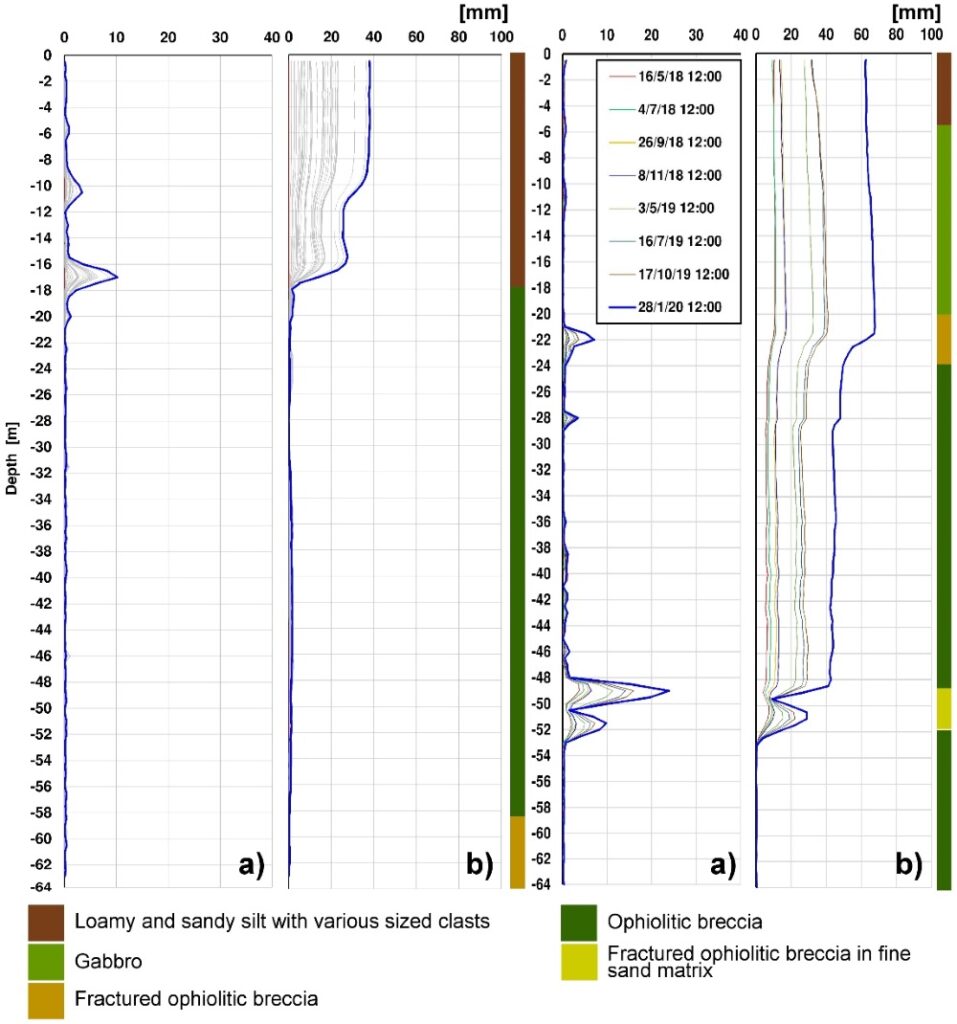
La nécessité de collecter des informations relatives à la déformation du sous-sol découle généralement de cas de dégradation connues (de manière approfondie ou partielle) pour lesquelles une indication du taux de déformation superficielle est généralement disponible. Ce dernier, mesuré à l’aide de techniques topographiques classiques ou par télédétection, fournit une première description de ce qui se passe au niveau du sous-sol sans toutefois fournir aucune information quant à la présence d’une ou plusieurs surfaces de glissement et à leur position en profondeur. Pour disposer d’informations sur des déformations locales en profondeur, il est possible d’avoir recours à la mesure inclinométrique. En fonction de nombreux paramètres (tels que la criticité du site, l’accessibilité, les coûts, etc.) il est possible d’opter pour des mesures manuelles ou automatiques. Les systèmes automatiques permettent de résoudre tous les problèmes d’accessibilité et d’obtenir un ensemble de données bénéficiant d’une haute résolution temporelle qui peut être comparée à d’autres paramètres tels que les précipitations ou les oscillations du niveau de la nappe à l’intérieur du versant. La figure 5 montre un exemple typique d’une zone de montagne de la Ligurie (commune de Ne – Val Graveglia) où la présence d’une grande déformation gravitative à cinématique lente (20 à 30 mm/an environ) est bien connue. Ces données sont disponibles sur la plateforme de télédétection (InSAR) mais elles ne permettent pas d’identifier de manière objective la cinématique profonde. Pour remédier à ces limites, 4 perforations ont été réalisées et équipées de deux tubes inclinométriques et deux tubes piézométriques. Les deux tubes inclinométriques sont mesurés de manière manuelle (Prato) et robotisée (Arzeno). L’inclinomètre robotisé a permis d’identifier la zone de glissement dans la zone d’Arzeno et d’en suivre avec précision l’évolution dans le temps. Sur le site de Prato, la périodicité intrinsèque des mesures manuelles a permis uniquement d’identifier la zone critique et de formuler une série d’hypothèses quant à l’évolution dans le temps. La permutation de l’instrumentation entre les sites a permis de combler ensuite les lacunes relatives à l’évolution temporelle dans la zone de Prato. La disponibilité de données collectées uniquement périodiquement ne permet presque jamais d’identifier de manière correcte les phases d’accélération, qui sont typiquement un des éléments les plus critiques des glissements de terrain à cinématique lente. Souvent caractérisés par des mouvements constants et de faible ampleur, les phénomènes de glissement de terrain à cinématique lente ne s’opposent pas à la coexistence d’habitations et, d’infrastructures. Un contrôle adéquat est cependant nécessaire afin d’identifier les éventuels phénomènes de réactivation ou d’accélération risquant de déboucher sur des situations extrêmement critiques.
Cas d’utilisation les plus indiqués :
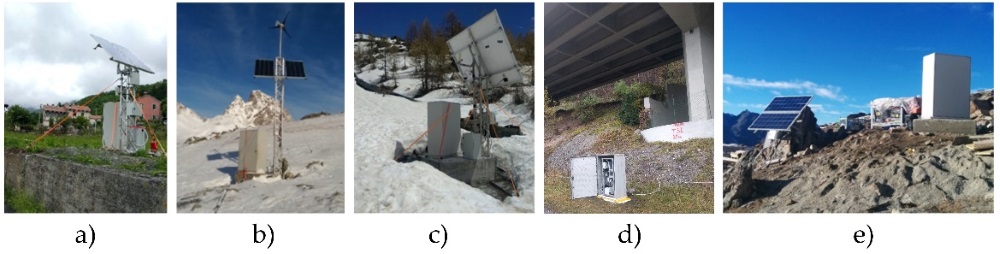
Le cas typique est la mesure de l’évolution de la déformation du sous-sol dans des zones sujettes à des phénomènes de dégradation moyennement profonds / très profonds et caractérisés par une cinématique lente. La figure 8 montre combien les contextes opérationnels peuvent varier (haute altitude, altitude moyenne, présence d’infrastructures d’habitations) mais l’objectif fondamental reste la nécessité de mesurer le régime de déformation du sous-sol, les accélérations du mouvement et les éventuelles relations avec les agents naturels (précipitations/circulation des eaux souterraines) et anthropiques (excavations, circulation de véhicules, etc.).
En dehors des glissements de terrain, les systèmes inclinométriques (manuels, automatiques) sont régulièrement utilisés lors de travaux souterrains ou d’opérations qui, en général, prévoient des excavations d’une certaine importance (Fig. 9).