Description technique du principe de fonctionnement:
Le Lidar (de l’anglais Light detection and Ranging) est un instrument qui, à travers l’émission d’une séquence d’impulsions laser, est en mesure de reconstruire une image tridimensionnelle d’un objet ou d’une surface mesurée. En général, le système est structuré de manière à pouvoir émettre une série d’impulsions laser et en recevoir les échos. La version la plus moderne du LiDAR est caractérisée par la capacité d’analyser l’intégralité de la forme d’onde de l’écho (full waveform).Cette capacité est très importante, car elle permet d’effectuer une opération de classification du signal de retour. En effet, il est possible d’identifier, en fonction des caractéristiques de l’écho, le type d’objet qui l’a généré. Il est ainsi possible, par exemple, de distinguer les données liées à la réponse de la végétation de grande taille de celles provenant de la végétation arbustive ou du terrain.
En matière d’étude des glissements de terrain, les données relatives à l’écho renvoyé par le terrain (ground) sont incontestablement les plus importantes, car elles permettent de reconstruire un modèle numérique du terrain.
Ces données s’avèrent généralement très importantes, car elles permettent d’analyser la morphologie de la surface topographique même si celle-ci est recouverte de végétation.
Il existe deux grandes catégories de LiDAR basées sur le même principe de fonctionnement : la catégorie aéroportée et la catégorie terrestre (appelée également scanner laser terrestre).
Le système aérien est nettement plus complexe car il se compose non seulement de l’appareil LiDAR proprement dit mais également d’un ensemble d’éléments qui permettent l’acquisition du nuage de points en mouvement. Les autres éléments essentiels sont le récepteur GNSS, le système inertiel et l’unité de commande. À partir de l’assemblage de ces données, le système peut reconstruire la trajectoire du vol et géo-rapporter correctement le nuage de points acquis. En général, outre ces éléments, le système LiDAR est également équipé d’un appareil photo capable d’acquérir une séquence de photogrammes à utiliser de manière stéréoscopique pour créer une orthophotomosaïque. Actuellement, la précision des nuages de points et du produit orthophotographique est généralement de l’ordre du décimètre.



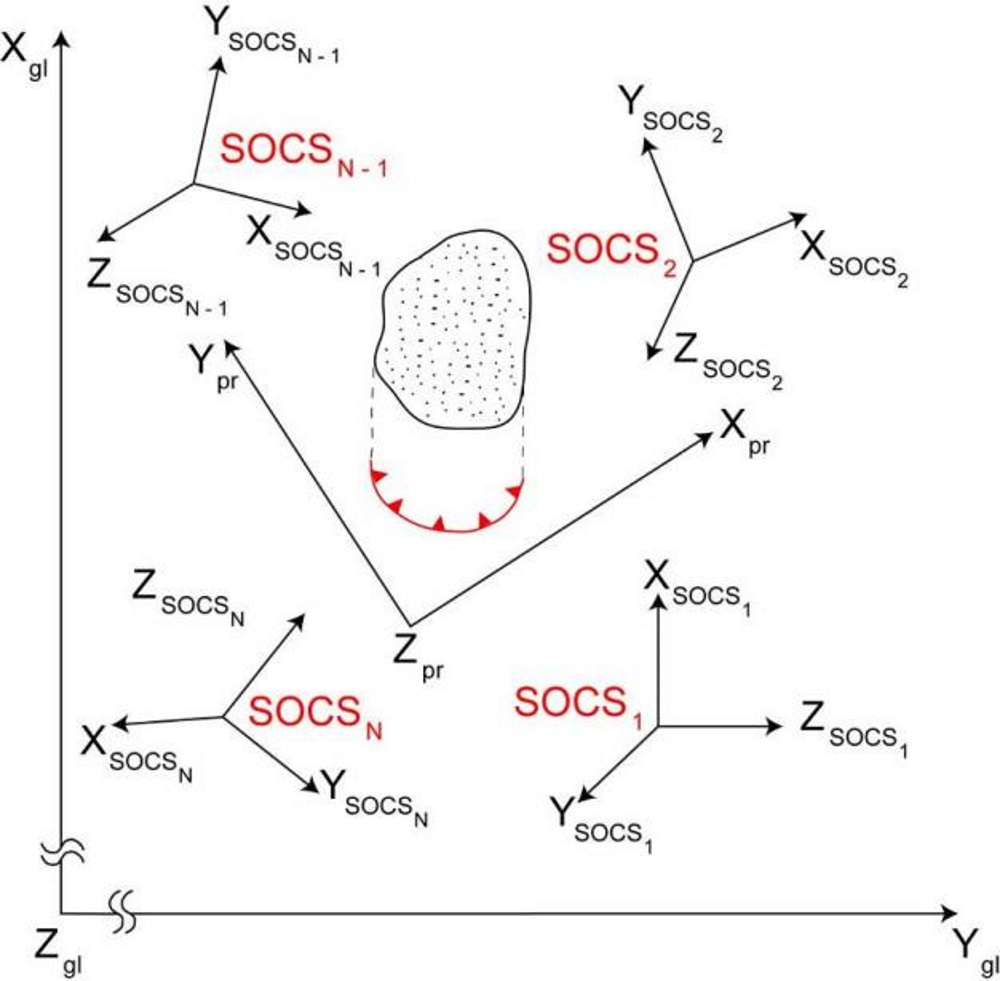
La version terrestre du LiDAR se présente habituellement comme un instrument de dimension plus petites permettant une bonne portabilité. Il s’agit d’un instrument utilisé sur un support spécial (généralement un chevalet photographique) et qui peut capturer un nuage de points se trouvant dans la zone environnante. Il s’agit par conséquent d’une acquisition statique depuis un point de balayage unique. Pour capturer une zone plus grande, il est donc nécessaire d’utiliser la méthode du balayage multiple, c’est-à-dire d’effectuer plusieurs balayages depuis des points de vue différents s’inscrivant dans un référentiel unique. Pour ce faire, on utilise généralement des points ou des éléments de référence qui permettent ensuite une opération d’assemblage des différents balayages.
Description des méthodes d’utilisation pour la surveillance des phénomènes de glissement de terrain et exemples pratiques :
En ce qui concerne l’étude et la surveillance des phénomènes de glissement de terrain, le LiDAR est utilisé principalement pour deux finalités :
- comme soutien à d’autres activités de recherche et de surveillance en fournissant un modèle numérique du terrain à haute résolution sur de vastes portions du territoire ;
- comme système de surveillance proprement dit pour l’évaluation des variations morphologiques d’une zone d’étude donnée.
Les détections LiDAR sur de vastes zones se prêtent particulièrement bien à l’identification et à la cartographie des phénomènes de glissement de terrain, qu’ils soient récents ou de formation plus ancienne. Cette capacité se révèle très utile pour la détection de phénomènes de glissement de terrain qui se sont produits en concomitance avec une inondation. Une détection LiDAR et l’orthophotographie correspondante offrent un soutien incomparable pour l’identification des phénomènes géo-hydrologiques, qu’ils soient liés à la dynamique du versant ou torrentielle. En général, cet instrument est donc particulièrement utile (surtout la version aéroportée) pour l’étude des conséquences d’une inondation sur de grands espaces.
La version terrestre est quant à elle fréquemment utilisée pour l’acquisition de modèles numériques d’affleurements et de parois rocheuses sub-verticales. Dans ce cas, les détections (comme celles réalisées avec des drones) peuvent être très utiles pour identifier les discontinuités.
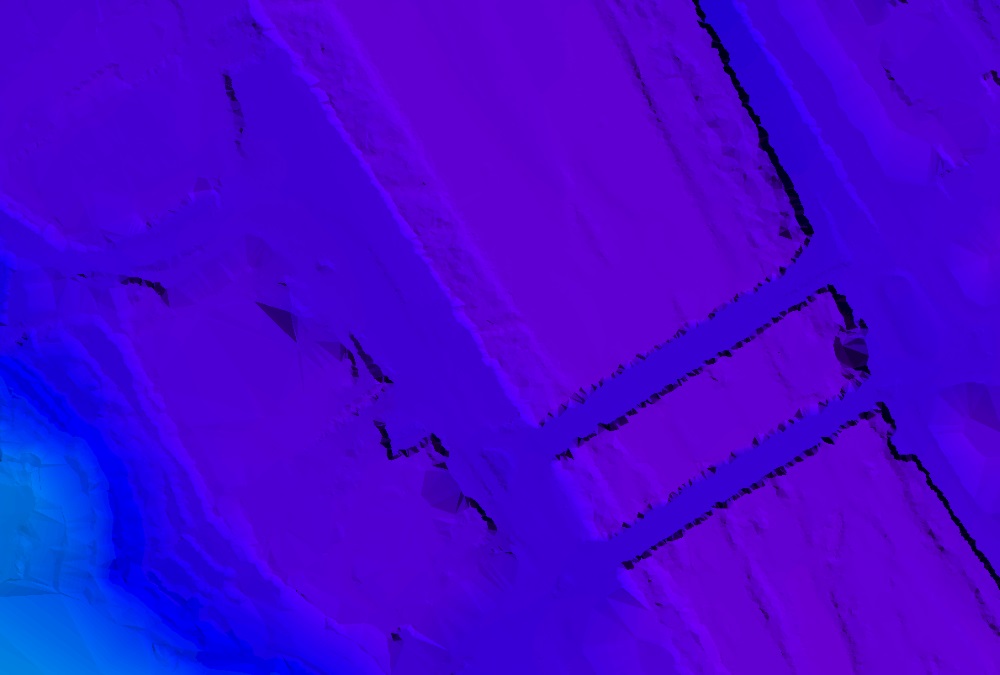
Dans le domaine de l’étude de l’évolution d’un phénomène de glissement de terrain, le Lidar est habituellement utilisé pour acquérir une séquence de modèles numériques du terrain sur une même portion de territoire.
Ces modèles numériques du terrain peuvent être comparés pour identifier et mesurer les éventuelles différentes liées à l’évolution du processus gravitatif. Difficilement utilisable avec des systèmes à temps quasi réel, le LiDAR peut être utilisé pour identifier des macro-différences comme celles liées au détachement de blocs de parois rocheuses ou des variations plus discrètes et progressives telles que celles liées à des glissements de terrain à comportement progressif et non impulsif. Compte tenu de la précision décimétrique du nuage de points, ce système ne convient généralement pas à la surveillance de glissements de terrain très lents, car l’ampleur du déplacement risque d’être du même ordre de grandeur que l’incertitude du nuage de points. La densité élevée des points décrivant le terrain au niveau du sol permet de les utiliser pour l’estimation volumétrique des variations qui se sont produites ou pour la génération de cartes et de sections.




.