Description technique du principe de fonctionnement:
Les systèmes aériens pilotés à distance, appelés drones ou UAV (Unmanned Aerial Vehicle) sont des appareils volants caractérisés par une capacité de commande autonome des mécanismes qui en régulent le vol. Développés au cours des dernières décennies et n’étant plus désormais réservés au seul domaine militaire mais aussi civil, les drones sont aujourd’hui une solution efficace et économique pour survoler des portions de territoire et effectuer des détections à l’aide des capteurs qu’ils embarquent.
Dans le domaine civil, les UAV sont habituellement utilisés comme moyens de transport des dispositifs de détection de paramètres physiques donnés pouvant servir aux activités de recherche à réaliser. S’agissant de l’étude des phénomènes de glissement de terrain, la plupart des UAV sont équipés de caméra photo/vidéo capables de capturer une séquence d’images de la zone à l’étude.
Il existe différentes catégories de drones mais les plus courants sont les systèmes à aile fixe (de petits avions dotés d’un système de propulsion électrique ou d’un moteur à explosion) et les multicoptères (systèmes dotés d’un nombre d’hélices variant de 4 à 12) Ces deux configurations ont des caractéristiques distinctes mais également des points communs. Les points communs sont un système électronique centrale chargé de gérer les paramètres de vol, de maintenir l’appareil en vol et de lui faire suivre une trajectoire. Les autres points communs sont un capteur gyroscopique et une boussole, chargés d’indiquer l’orientation dans l’espace et la direction du véhicule, et un GNSS (Global Navigation Satellite System) qui communique ses coordonnées au véhicule dans un référentiel donné. Ces éléments constituent le cerveau de l’UAV chargé de commander les moteurs et les appendices aérodynamiques mobiles.
Le vol du système à aile fixe est rendu possible par la poussée du moteur et le mouvement des appendices aérodynamiques mobiles, tandis que celui du multicoptère est géré par la rotation contrôlée des différents moteurs qui entraînent la rotation des hélices.
En fonction de la complexité du véhicule, les UAV peuvent être capables de décoller et d’atterrir de manière autonome et de suivre un itinéraire programmé constitué de points (waypoints) aux coordonnées préétablies.
Ces fonctionnalités se révèlent très utiles lorsque le système doit être utilisé pour une campagne de détection. Dans le domaine de l’étude et de la surveillance des phénomènes de glissement de terrain, les drones se révèlent particulièrement utiles pour capturer des images d’une zone donnée en vue de leur traitement ultérieur pour la génération de modèles numériques du terrain.
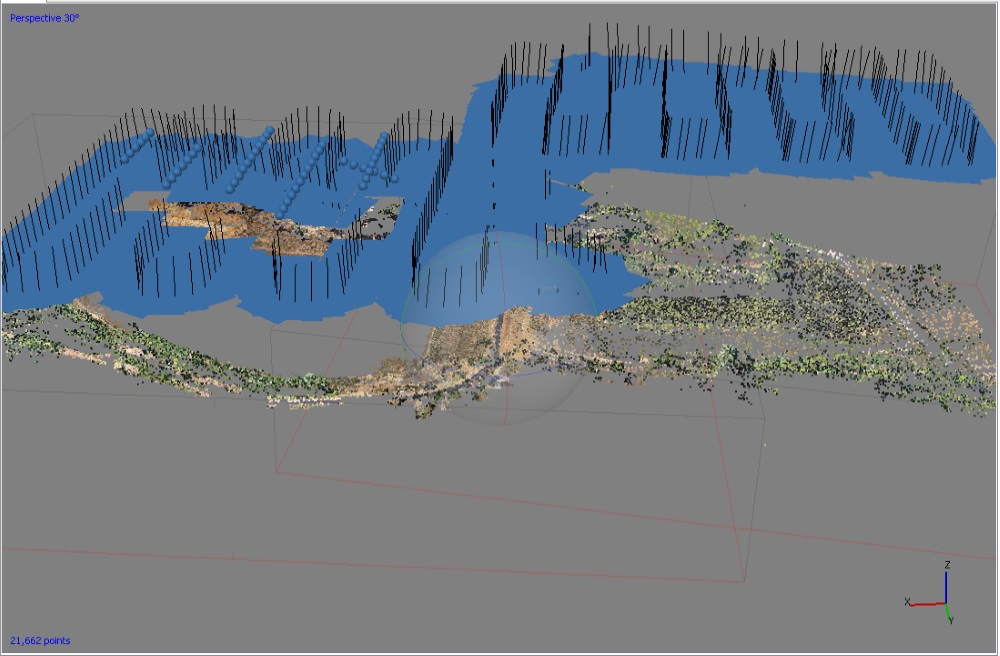
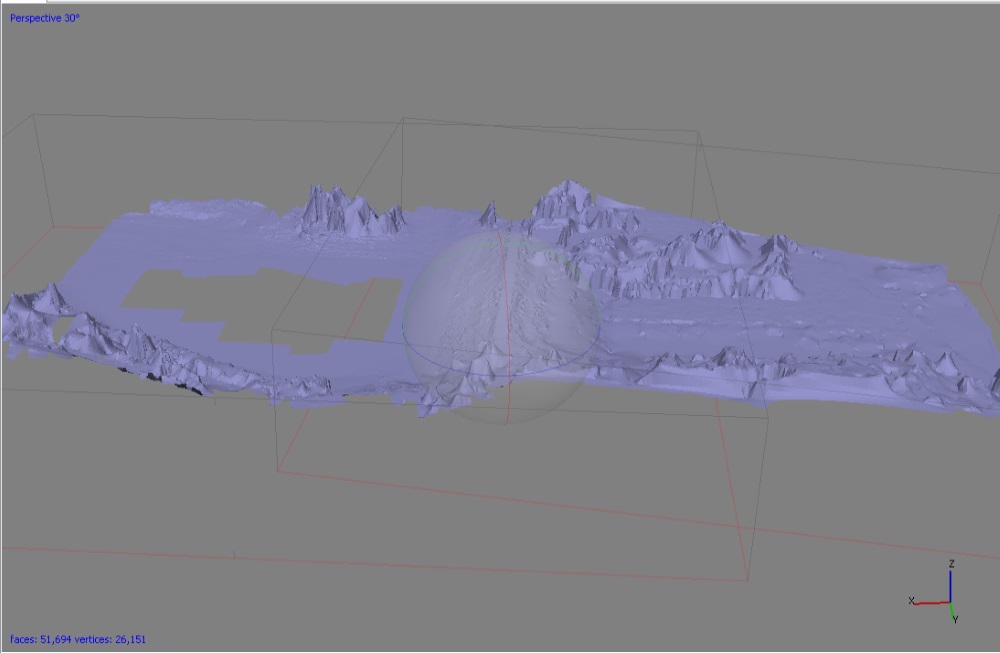
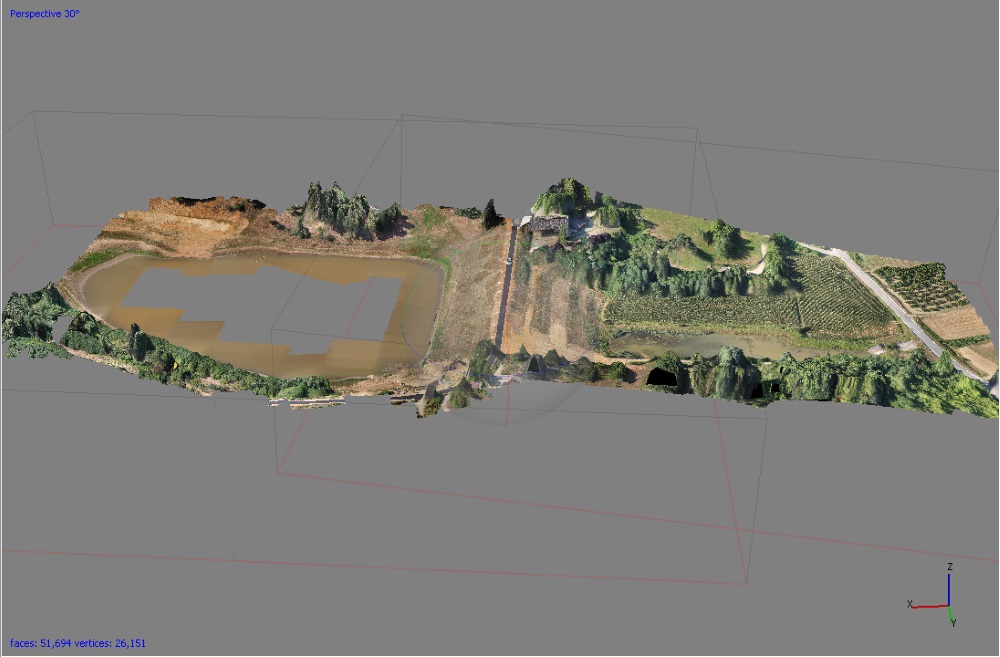
L’utilisation des drones a connu une forte impulsion suite à la diffusion d’une technique dénommée Structure from Motion (SfM), une technique d’élaboration de séquence photographique d’images d’une même zone d’étude capturées depuis différents points de vue qui permet de créer un modèle numérique tridimensionnel de la zone analysée. Cette technique se base sur une procédure de reconnaissance de points homologues à l’intérieur de la séquence d’images. L’algorithme génère un premier nuage de points (clairsemé) en se basant sur la reconnaissance des points homologues, sur l’identification des points de capture et sur l’orientation des différents photogrammes. L’algorithme génère ensuite un nuage de points tridimensionnel plus dense pour créer un modèle de la surface auquel associer les données photographiques. Le résultat final est une image solide, c’est-à-dire une représentation numérique tridimensionnelle de l’objet.
Description des méthodes d’utilisation pour la surveillance des phénomènes de glissement de terrain et exemples pratiques:
Les drones sont des instruments particulièrement utiles pour l’étude et la surveillance des phénomènes de glissement de terrain. L’utilisation la plus simple et efficace est l’acquisition d’un modèle numérique de la zone détectée à très haute résolution qui peut être utilisé pour effectuer des analyses dans des zones où l’accès direct par les opérateurs peut être dangereux. En général, les multicoptères sont davantage indiqués pour la détection de zones de petite dimension mais, ayant la possibilité de capturer des images avec une orientation oblique de l’appareil photo, ils peuvent être utilisés pour la détection de parois rocheuses. Les systèmes à aile fixe sont quant à eux habituellement équipés d’appareils photo à prise de vue verticale et ont un rayon d’action plus ample ; il est donc de bonne norme de les utiliser pour la détection de zones plus vastes avec une pente modérée.
Dans le domaine de la surveillance, les drones peuvent être utilisés pour acquérir des modèles numériques du terrain en séquence et obtenir ainsi les données nécessaires pour effectuer une analyse multi-temporelle de la zone à l’étude. À travers la comparaison de modèles numériques du terrain, il est possible d’identifier les zones qui ont subi des variations morphologiques et de mesurer les variations volumétriques résultant, par exemple, du détachement d’un bloc de roche. La comparaison de modèles numériques du terrain permet ainsi l’identification et la mesure des variations qui se sont produites dans l’intervalle de temps séparant les deux détections.
Cas d’utilisation les plus indiqués:
En ce qui concerne les parois rocheuses, les drones peuvent être très utiles pour évaluer le risque résiduel juste après un effondrement de roche ou pour caractériser un amas rocheux à travers la détection et la cartographique des principales discontinuités. La figure 2 montre un modèle à haute résolution d’une paroi rocheuse où les principales discontinuités ont été identifiées.

En revanche, avec des systèmes à aile fixe, il est possible de survoler des zones plus vastes, de détecter la présence d’éventuels phénomènes de dégradation et d’en suivre l’évolution à travers la comparaison de modèles numériques du terrain et des orthophotographies qui y sont associées. En effet, il est possible à travers des techniques de corrélation d’images numériques, de mesurer les variations qui se sont produites entre deux détections successives.