Descrizione tecnica delle modalità di funzionamento
Nel campo del monitoraggio delle frane riveste spesso molta importanza comprendere la geometria dell’area in movimento. Per raggiungere tale obiettivo è quindi necessario conoscere i movimenti sulla superficie topografica ma anche in profondità. Nel caso in cui si renda necessario valutare la dinamica deformativa del sottosuolo, la misura ampliamente più utilizzata è quella inclinometrica. Tale misurazione consente di valutare gli spostamenti orizzontali in profondità all’interno di una perforazione attrezzata con un rivestimento apposito e l’impiego di una o più sonde inclinometriche, che consentono di trasformare un valore di inclinazione della sonda in spostamento orizzontale. L’andamento di tali misurazioni nel tempo consente di valutare il tasso di attività del fenomeno di dissesto. Grazie ai valori di deformazione in profondità è possibile identificare la posizione della/e superfici di movimento della frana e di stimare quindi i volumi potenzialmente coinvolti.
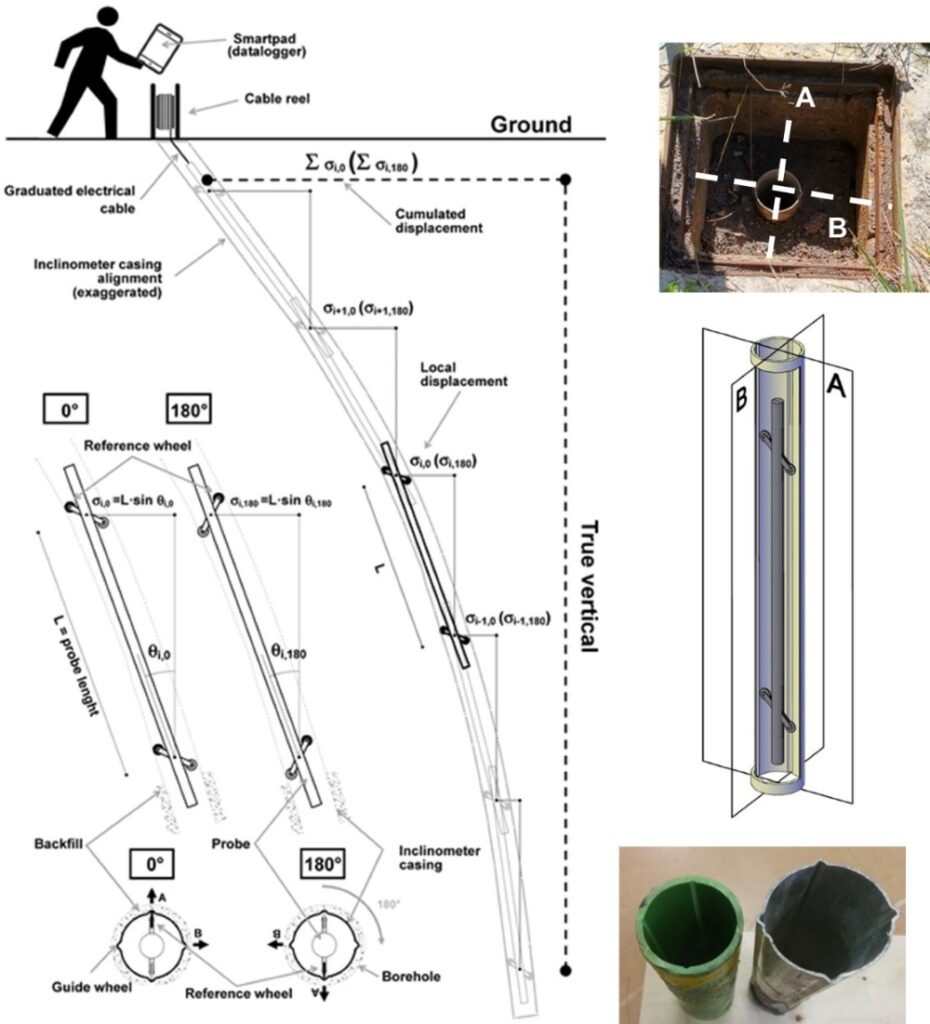
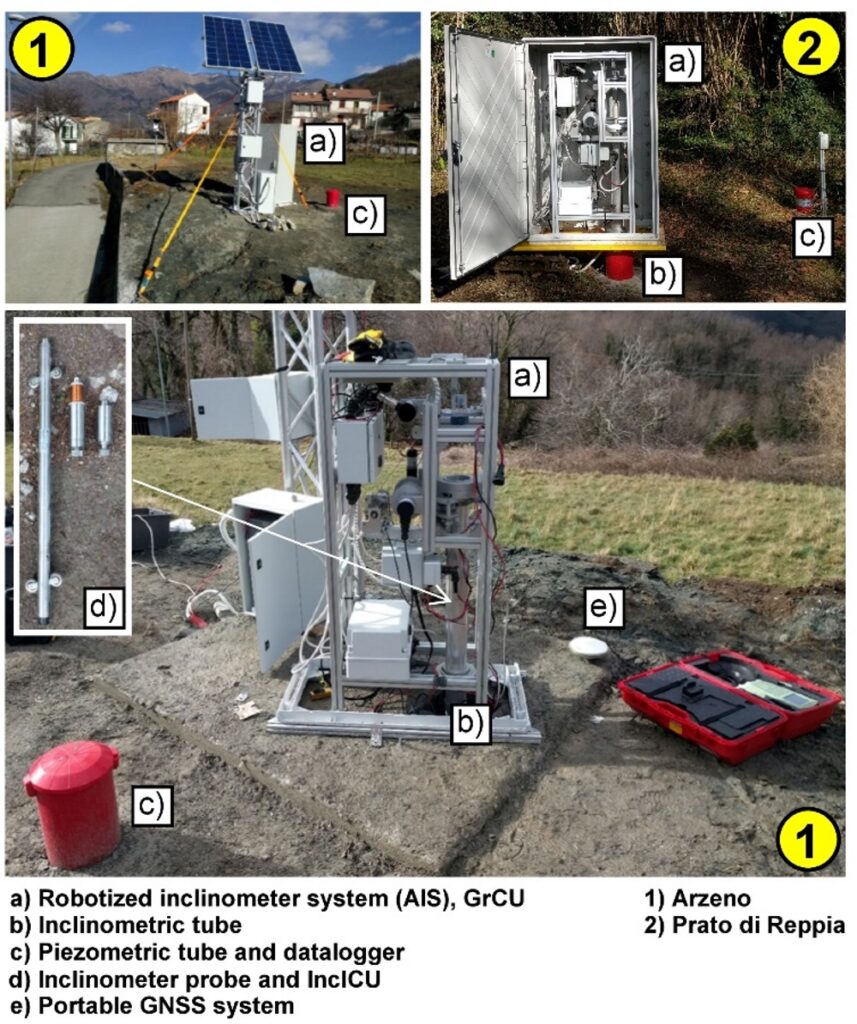
Il sistema di misurazione tradizionale è costituito da: i) una sonda inclinometrica, ii) un tubo guida scanalato (chiamato tubo inclinometrico) che riveste la perforazione sino ad una profondità maggiore della superficie di movimento della frana, iii) da una centralina di misura (datalogger) e da un cavo elettrico graduato (Fig.1,2).
La sonda inclinometrica è costituita da un cilindro in acciaio o titanio, lungo circa 60÷70 cm e con diametro di 2÷3 cm. Ad entrambe le estremità è dotata di due carelli con ruote con interesse di 50 cm (60cm per gli anglosassoni) che permettono lo scorrimento controllato della sonda all’interno delle scanalature del tubo inclinometrico. La sonda è dotata di due sensori accelerometrici (servoaccelerometrici o con tecnologia MEMS), ciascuno dei quali restituisce un segnale elettrico proporzionale all’angolo di inclinazione dell’asse dello strumento rispetto alla verticale. Un accelerometro misura l’inclinazione nel piano delle rotelle (asse A), l’altro in quello ortogonale (asse B).
All’estremità superiore della sonda è collegato un cavo elettrico, che trasferisce alimentazione e segnali di misura tra la sonda e la centralina (datalogger). Lo stesso cavo funge da elemento di sostegno e movimentazione della sonda inclinometrica nel tubo guida e grazia ad una serie di tacche (o graduazioni) consente il posizionamento alle varie profondità di misura (tipicamente ogni 50cm o 100cm).
I principi fondamentali della misura inclinometrica sono:
- Il tubo inclinometrico si deforma come il terreno circostante e pertanto le misure di inclinazione del tubo possano essere considerate rappresentative dei movimenti del terreno;
- La verticale inclinometrica, che si deforma come un corpo continuo, viene discretizzata con una spezzata che risulta tanto più precisa quanto più elevato è il numero di punti di misura;
- Le misure vengono ripetute per due volte consecutive ruotando la sonda di 180° rispetto alla prima serie di misure. Tale approccio consente di incrementare la qualità del dato e di individuare e correggere eventuali errori grossolani tipici delle operazioni manuali;
- La perforazione deve essere sufficientemente profonda e tale da intercettare livelli stabili e non soggetti a movimenti significativi;
- Le misure vengono analizzate quota per quota (misura locale) o per integrazione dal basso (misura cumulata) considerando il punto di partenza come ubicato in zona stabile (a sensi del p.to 4)
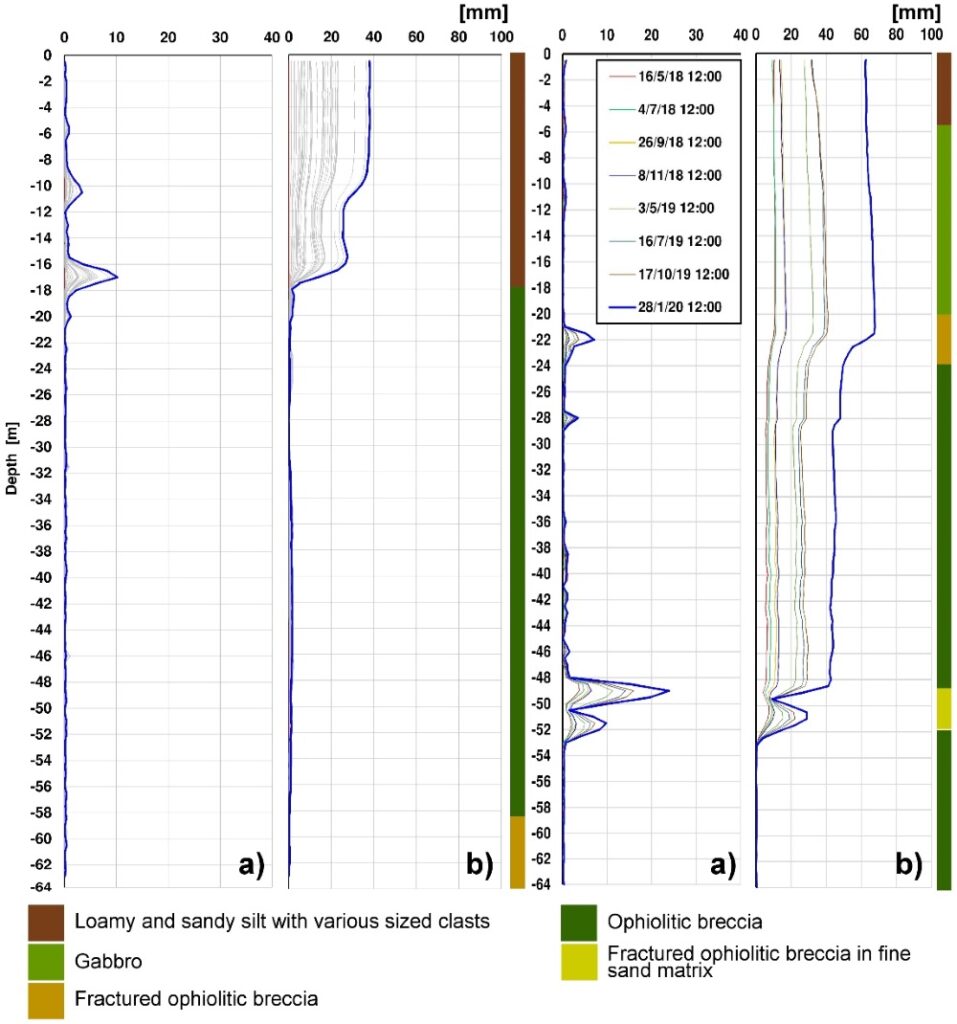
- Le misure vengono analizzate in differenziale rispetto alla prima misura considerata come origine in quanto non è possibile realizzare perforazioni perfettamente verticali (Fig.3,7).
I movimenti del terreno provocano lo spostamento del tubo dalla sua posizione iniziale in settori tipicamente caratterizzati da materiale con scadenti caratteristiche geomeccaniche. L’entità, la profondità e la velocità di tali spostamenti vengono calcolate confrontando le misure successive con il set di dati iniziale (misura di origine).

Anche per le misure inclinometriche esiste, oltre alla strumentazione manuale, la possibilità di effettuare delle acquisizioni basate sull’impiego di sistemi automatizzati. Per quanto riguarda i sistemi automatizzati, esistono fondamentalmente due approcci:
- Il primo è quello di creare delle vere e proprie catene di sensori (stringhe) posizionati stabilmente all’interno del tubo;
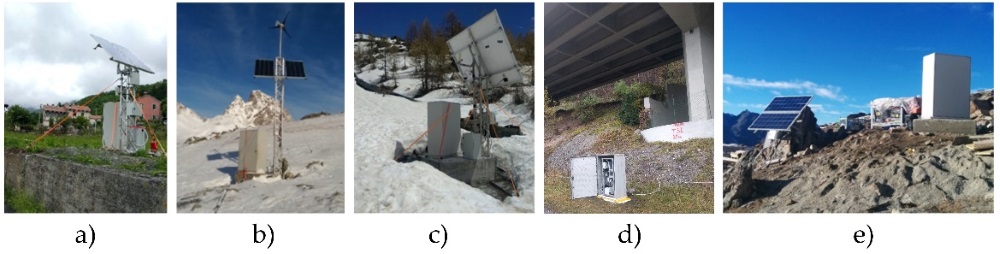
- il secondo approccio, sviluppato dal CNR IRPI, è stato invece quello di robotizzare la misura manuale in modo da massimizzare i vantaggi dati dalla qualità della misura manuale con quelli dell’automatizzazione elettromeccanica (Fig.4, 6).
Entrambi i sistemi hanno vantaggi e svantaggi, sia in termini tecnici/metrologici che di costo. In Tabella 1 è possibile osservare una sintetica analisi comparativa dei due diversi approcci.
| Sistema inclinometrico robotizzato | In-place inclinometers (IPI) with a string of biaxial sensor | |
| Discretizzazione verticale | 500 mm (EU) o 60 cm (non EU) | 1000 ÷ 3000 mm |
| Risoluzione temporale | 1÷8 misure/giorno | 1÷24 misure/giorno |
| Doppia lettura (0-180°) | Si | Non possibile a causa della staticità delle sonde |
| Posizionamento della sonda nel tubo | Automatico mediante motore ed encoder di precisione | Sonde posizionate in modo permanente alle profondità di progetto |
| Connessione tra sonda e datalogger | Cavo in dyneema per la sola movimentazione e sistema semi wireless per la gestione dei dati | Cavo elettrico per la trasmissione di alimentazione e segnali e acciaio per il sostegno meccanico. Le sonde sono meccanicamente collegate mediante strutture metalliche o fibra di carbonio |
| Accuratezza | Molto elevate grazie alla doppia lettura ed alla robotizzazione | Elevata. Sussistono incertezze circa la stabilità delle misura a lungo termine |
| Capacità di misurare l’intera lunghezza del tubo | Sì. Il sistema è indipendente dalla lunghezza del tubo | Si se viene strumentato il tubo per tutta la sua lunghezza. In molti casi per questioni economiche si opta per una strumentazione parziale di alcuni tratti. |
| Capacità di descrivere zone in deformazione di limitate dimensioni | La discretizzazione di 500 mm consente di misurare correttamente anche bande di taglio di limitate dimensioni | In caso di un ridotto numero di sensori o di interessi tra questi troppo elevate è possibile una sottostima delle reali deformazioni |
| Capacità di descrivere grandi deformazioni | La capacità è comparabile a quanto offerto dalle misure manuali e arriva sino a quando la sonda non riesce a passare nei tratti a troppo elevate curvature | Con la posizione permanente solitamente è possibile misurare deformazioni superiori agli alti sistemi. Tuttavia, in tali casi, non è più possibile estrarre le sonde che vengono irrimediabilmente perse |
| Precisione | ±0.4 mm/30m per il canale A ±1.2 mm/30m per il canale B | ±2 mm/30m per il canale principale. Inferiore per il canale trasversale |
| Costo | Medio/alto ma indipendente dalla lunghezza del tubo | Medio/alto e proporzionale al numero di sensori installati |
Tabella 1. Quadro comparativo dei sistemi inclinometrici automatici (da Allasia et. Al, 2020)
Descrizione delle modalità di utilizzo per il monitoraggio dei fenomeni franosi ed esempi operativi:
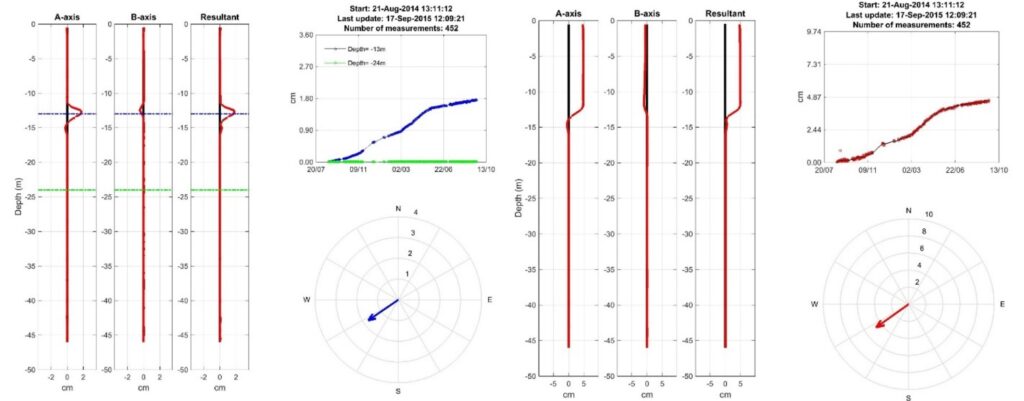
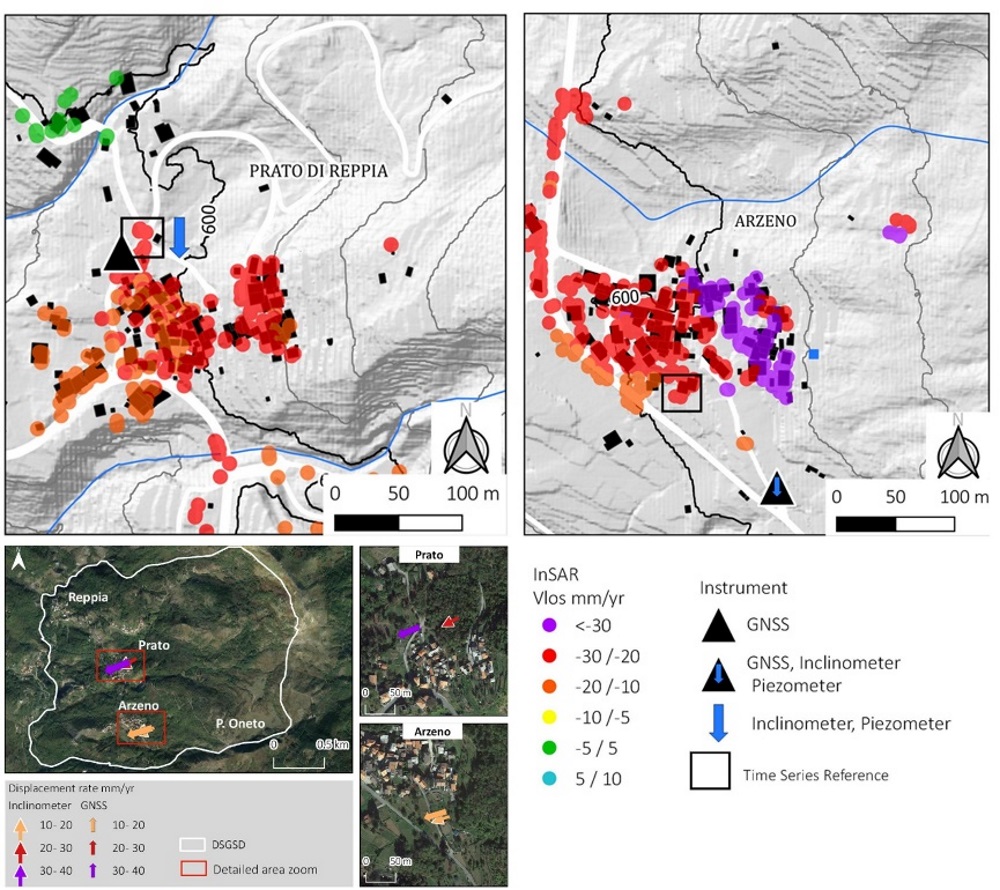
La necessità di acquisire informazioni relative alla deformazione del sottosuolo si colloca tipicamente in situazioni di dissesto conosciute (in modo approfondito o anche solo parziale), nelle quali solitamente è disponibile un’indicazione del tasso di deformazione misurato in superficie. Quest’ultimo, misurato con tecniche topografiche tradizionali o tramite telerilevamento, fornisce una prima descrizione di quanto accade nel sottosuolo senza fornire alcuna indicazione in merito alla presenza di una op più superfici di scorrimento e della loro posizione in profondità. Per avere informazioni deformative puntuali in profondità si ricorre pertanto alla misura inclinometrica. A seconda di molteplici parametri (tra cui criticità di sito, accessibilità, costi etc..) si può ricorrere a misure manuali o automatiche. La scelta dei sistemi automatici consente di risolvere tutti di problemi di accessibilità nonché di ottenere un dataset con una elevata risoluzione temporale che può essere comparata con altri parametri quali, per esempio, le precipitazioni o le oscillazioni del livello della falda all’interno del versante. L’esempio di Fig. 5 mostra una tipica area montana della Liguria (Comune di Ne – Val Graveglia), in cui è nota la presenza di una grande deformazione gravitativa a cinematica lenta (circa 20÷30 mm/anno). Tali dati sono disponibili da piattaforme di telerilevamento (InSAR) ma non consentono di identificare in modo oggettivo la cinematica profonda. Per ovviare a tale limite, sono state effettuate 4 perforazioni successivamente attrezzate con due tubi inclinometrici e due tubi piezometrici. I due tubi inclinometrici vengono misurati in modalità manuale (Prato) e robotizzata (Arzeno). L’inclinometro robotizzato ha permesso di individuare nell’area di Arzeno la superficie di scivolamento e di seguirne in modo accurato l’evoluzione temporale. Sul sito di Prato, la periodicità intrinseca alle misure manuali ha solo permesso di individuare l’area critica e di formulare una serie di ipotesi circa l’evoluzione nel tempo. Il successivo scambio di sito-strumentazione ha consentito di colmare anche le lacune relative all’evoluzione temporale sull’area di Prato. La disponibilità di dati acquisiti solo periodicamente non consente quasi di mai di individuare in modo corretto le fasi accelerazione che tipicamente rappresentano uno degli elementi più critici delle frane a cinematica lenta. Tali fenomeni, spesso caratterizzati da trend di movimento costanti e di bassa entità, possono consentire la coesistenza dei centri abitati e delle infrastrutture con fenomeni franosi a cinematica lenta. Tuttavia, è sempre necessario un adeguato controllo per individuare eventuali fenomeni di riattivazione o accelerazione che potrebbero portare a situazioni estremamente critiche.
Scenari di utilizzo maggiormente indicati:
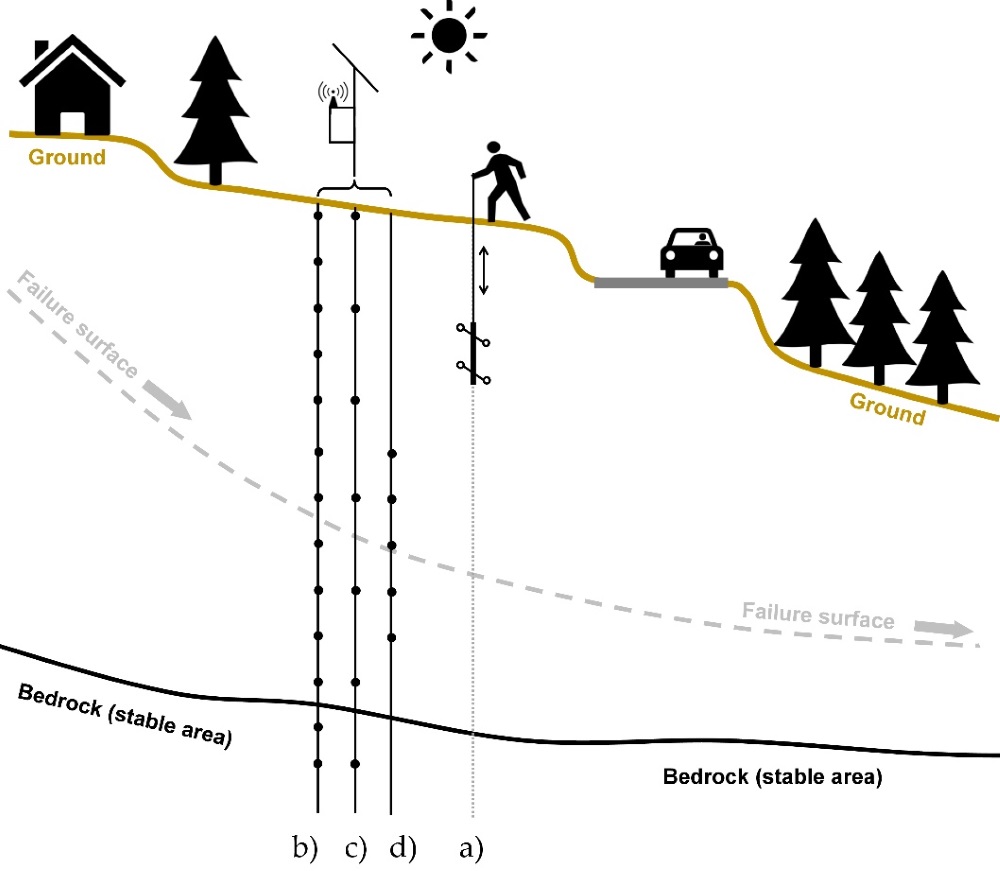
Lo scenario tipico è quello in cui si intende misurare l’evoluzione deformativa del sottosuolo in aree soggette a fenomeni di dissesto mediamente profondi /molto profondi e caratterizzati da cinematica lenta. Dalla figura 8, si osserva come i contesti operativi possono essere molteplici (alta quota, media quota, presenza di infrastrutture/centri abitati), ma l’obbiettivo fondamentale permane la necessità di misurare il regime di deformazione del sottosuolo, le accelerazioni di movimento e le eventuali relazione con le sollecitazioni naturali (precipitazioni/circolazione idrica sotterranea) e antropiche (scavi, transito mezzi etc.)
Oltre allo scenario di frana, i sistemi inclinometri (manuale, automatici) vengono sempre utilizzati nell’ambito delle opere in sotterraneo o che, in generale, prevedono scavi di una certa rilevanza (Fig. 9).