Descrizione tecnica delle modalità di funzionamento:
i sistemi aerei a monitoraggio remoto, anche detti droni o UAV (Unmanned Aerial Vehicle), sono dei velivoli caratterizzati da una capacità di controllo autonomo dei meccanismi che ne regolano il volo. Sviluppati negli ultimi decenni e utilizzati non solamente più in ambito militare ma anche civile, i droni sono oggi giorno un sistema molto efficace e a basso costo in grado di effettuare dei sorvoli su porzioni di territorio effettuando dei rilevamenti grazie ai sensori che sono capaci di trasportare.
In ambito civile, gli UAV vengono solitamente utilizzati come strumenti in grado di trasportare degli apparati per il rilevamento di determinati parametri fisici che possono essere funzionali alle attività di ricerca da svolgere. Nel campo dello studio dei fenomeni franosi, la maggior parte di essi è equipaggiato con foto/videocamere in grado di acquisire una sequenza di immagini dell’area di studio.
Esistono diverse categorie di droni ma i più diffusi, attualmente, sono i sistemi ad ala fissa (dei piccoli aerei dotato di un sistema di propulsione elettrico o con motore a scoppio) e i multicotteri (sistemi dotati di un numero di eliche che solitamente varia da 4 a 12). Queste due configurazioni hanno caratteristiche diverse ma anche elementi molto simili. Gli elementi comuni sono un sistema elettronico centrale in grado di gestire i parametri di volo, di mantenere l’apparato in volo e di fargli seguire una traiettoria. Gli altri elementi comuni sono un sensore giroscopico ed una bussola, che servono a fornire l’orientamento nello spazio e la direzione del mezzo, e un GNSS (Global Navigation Satellite System) che fornisce al mezzo le sue coordinate in un determinato sistema di riferimento. Questi elementi costituiscono il cervello dell’UAV che è in grado di comandare i motori e le appendici aerodinamiche mobili.
Il volo del sistema ad ala fissa è reso possibile dalla spinta del motore e dal movimento delle appendici aerodinamiche mobili, mentre quello del multicottero è gestito dalla rotazione controllata dei diversi motori che controllano la rotazione delle eliche.
A seconda della complessità del mezzo, gli UAV sono in grado di assolvere le funzioni di decollo ed atterraggio autonomo e di seguire una rotta preimpostata fatta di una serie di punti (waypoints) di coordinate prestabilite.
Queste funzioni risultano essere molto importanti nel caso in cui il sistema debba essere impiegato per delle campagne di rilevamento. Nel campo dello studio e del monitoraggio dei fenomeni franosi i droni risultano particolarmente utili per acquisire delle immagini di una determinata area di studio che possono essere successivamente elaborate per ottenere dei modelli digitali del terreno.
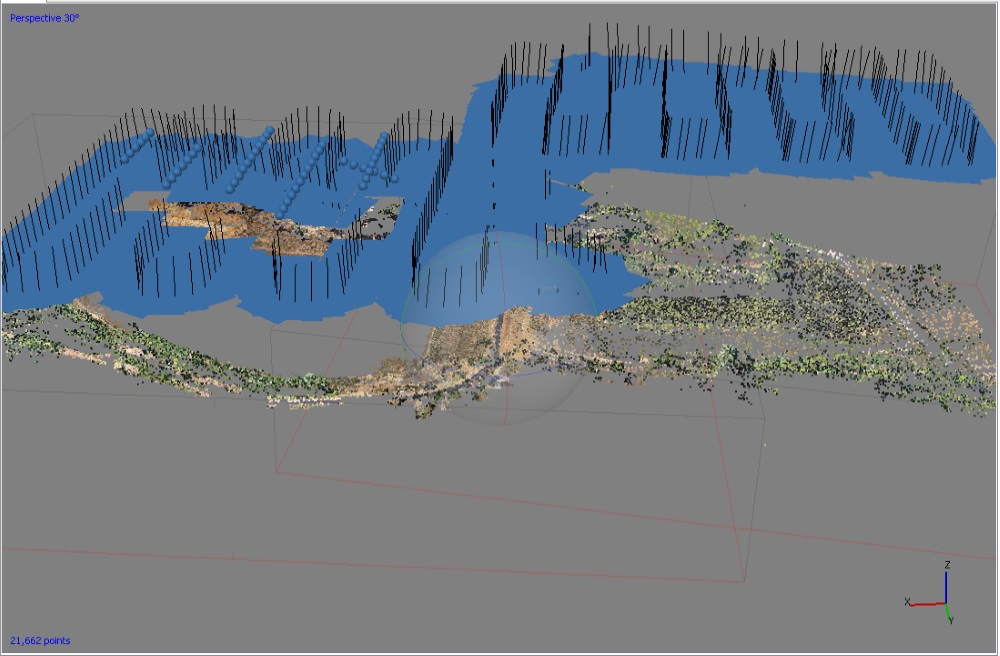
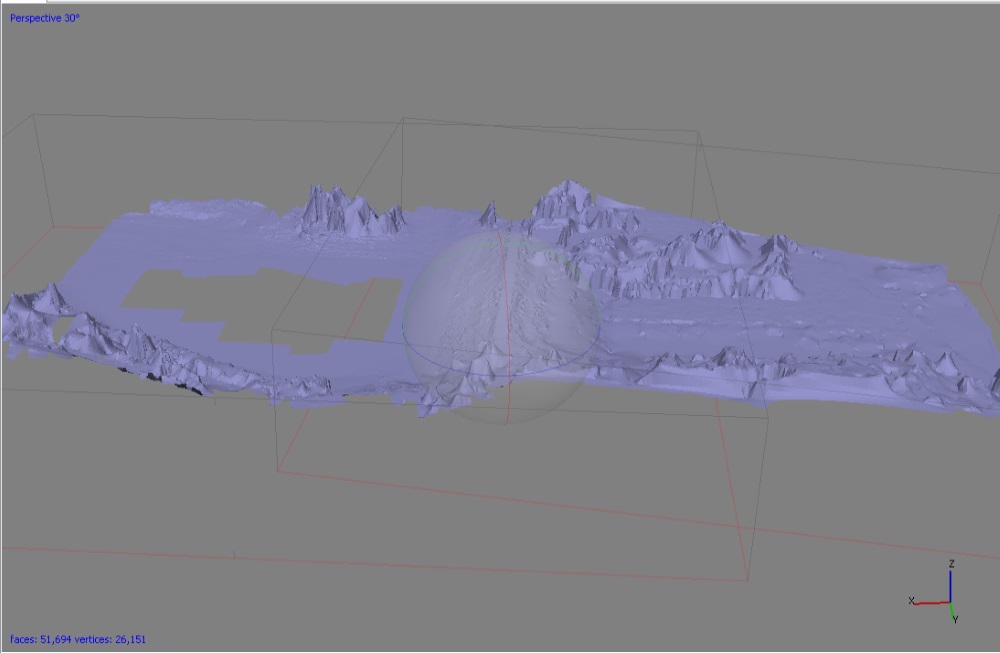
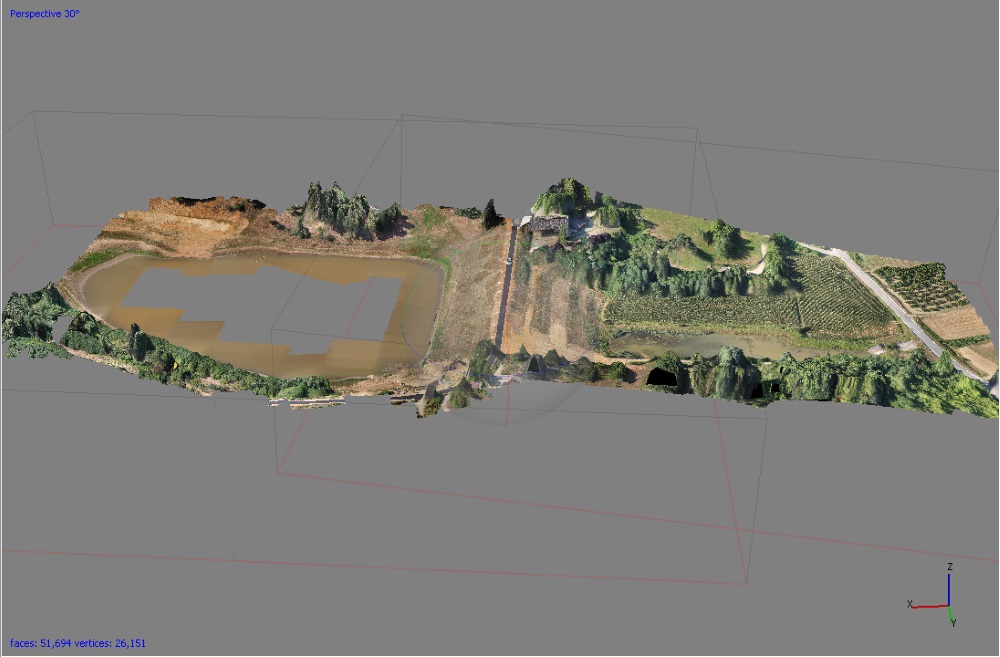
Grande impulso all’utilizzo dei droni è stata la diffusione di una tecnica chiamata Structure from Motion (SfM): si tratta di una tecnica di elaborazione di una fotosequenza di immagini di una stessa area di studio ripresa da punti diversi che è in grado di creare un modello digitale tridimensionale dell’area analizzata. La tecnica si basa su una procedura di riconoscimento all’interno della sequenza di immagini di punti omologhi. L’algoritmo è in grado di generare una prima (rada) nuvola di punti che si basa sul riconoscimento dei punti omologhi e sull’identificazione dei punti di scatto e sull’orientazione dei diversi fotogrammi. Successivamente, l’algoritmo è in grado di produrre una nuvola di punti tridimensionale più densa e poi di creare un modello della superficie a cui abbinare il dato fotografico. Il risultato finale è un’immagine solida, ovvero una rappresentazione digitale tridimensionale dell’oggetto.
Descrizione delle modalità di utilizzo per il monitoraggio dei fenomeni franosi ed esempi operativi:
I droni rappresentano uno strumento molto importante per lo studio ed il monitoraggio dei fenomeni franosi. L’impiego più semplice ed efficace è l’acquisizione di un modello digitale dell’area rilevata ad altissima risoluzione che può essere impiegato per effettuare delle analisi anche in aree in cui l’accesso diretto da parte di operatori può essere pericoloso. In generale, i multicotteri sono maggiormente indicati per il rilevamento di aree più limitate ma, avendo la possibilità di acquisire immagini anche con l’orientazione obliqua della fotocamera, possono essere impiegate per il rilevamento di pareti rocciose. I sistemi ad ala fissa, invece, sono solitamente equipaggiati con fotocamere a presa verticale e hanno un raggio di azione più ampio; per questo i sistemi ad ala fissa sono di norma maggiormente indicati per il rilevamento di aree più vaste a pendenza più moderata.
Nel campo del monitoraggio, i droni possono essere impiegati per acquisire modelli digitali del terreno in sequenza ed ottenere in questo modo il dato necessario per effettuare un’analisi multi-temporale dell’area indagata. Attraverso il confronto di modelli digitali del terreno è possibile identificare le aree che hanno subito delle variazioni morfologiche e misurare le variazioni volumetriche che sono il frutto, per esempio, del distacco di un blocco di roccia. In questo modo il confronto di modelli digitali del terreno consente l’identificazione e la misura delle variazioni avvenute nell’intervallo di tempo occorso tra i due rilevamenti.
Scenari di utilizzo maggiormente indicati:
Per quanto riguarda le pareti rocciose, I droni possono essere molto utili per valutare il rischio residuo immediatamente dopo un crollo in roccia oppure per caratterizzare un ammasso roccioso attraverso il riconoscimento e la mappatura delle principali discontinuità. In figura 2 è visibile un modello ad alta risoluzione di una parete rocciosa in cui sono state identificate le principali discontinuità.

Con sistemi ad ala fissa è invece possibile sorvolare aree più vaste, riconoscere la presenza di eventuali fenomeni di dissesto e seguirne l’evoluzione attraverso la comparazione di modelli digitali del terreno e delle ortofoto ad essi abbinate. Tramite tecniche di Digital Image Correlation è infatti possibile misurare le variazioni occors tra due rilevamenti successivi.